Hi
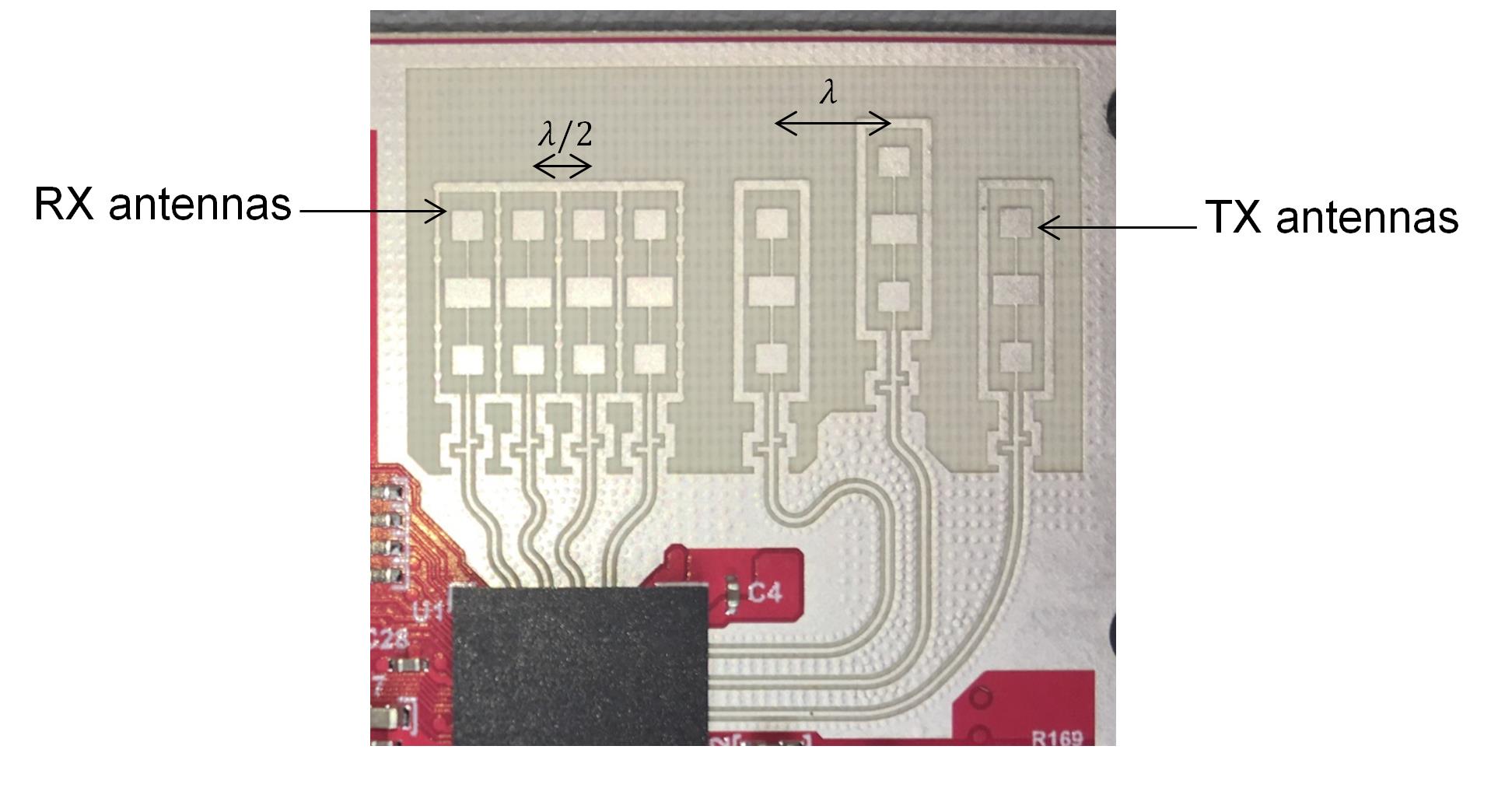
The position of the detected point cloud are defined with respect to the sensor. Since the sensor has the finite dimension, where is the origin defined exactly on the sensor?
Thanks!
Kai
Hi
The position of the detected point cloud are defined with respect to the sensor. Since the sensor has the finite dimension, where is the origin defined exactly on the sensor?
Thanks!
Kai