I set up the function like this:
rxRangeMsgObjectParams.msgIdType = CANFD_MCANXidType_29_BIT; rxRangeMsgObjectParams.startMsgIdentifier = 0x1D3; rxRangeMsgObjectParams.endMsgIdentifier = 0x1D5; rxMsgObjHandle3 = CANFD_createRxRangeMsgObject(canHandle, &rxRangeMsgObjectParams, &errCode);
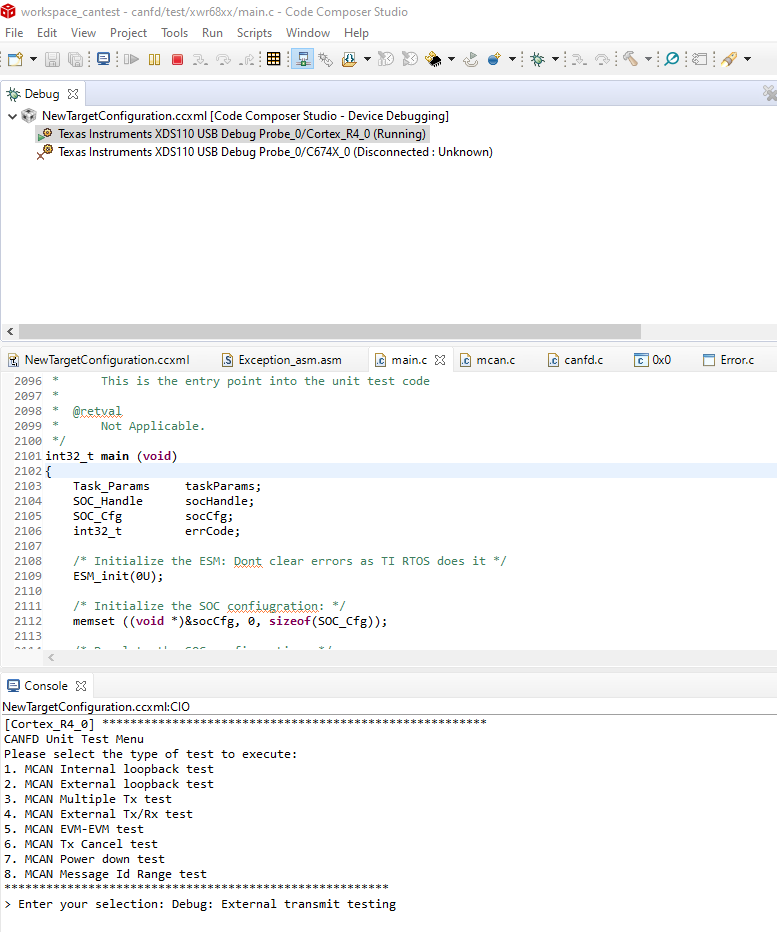
I do not get any error mesages. When I send messages to the EVM in the range above the callback funtion is not called.
Normal rx objects works with no problems defined as below:
rxMsgObjectParams.direction = CANFD_Direction_RX;
rxMsgObjectParams.msgIdType = CANFD_MCANXidType_29_BIT;//CANFD_MCANXidType_11_BIT;//CANFD_MCANXidType_29_BIT;
rxMsgObjectParams.msgIdentifier = 0x1D1;
rxMsgObjHandle = CANFD_createMsgObject(canHandle, &rxMsgObjectParams,
&errCode);
One weird thing is that if I send an can message to the EVM that is not set up as an object, the callback function is still called but with an empty handle.
If I send a can message that is set up in the range the callback funtion is not called at all. It is like the functinality of the range function is inverted.
/* Standard Include Files. */
#include <stdint.h>
#include <stdlib.h>
#include <stddef.h>
#include <string.h>
#include <stdio.h>
#include <math.h>
/* BIOS/XDC Include Files. */
#include <xdc/std.h>
#include <xdc/cfg/global.h>
#include <xdc/runtime/IHeap.h>
#include <xdc/runtime/System.h>
#include <xdc/runtime/Error.h>
#include <xdc/runtime/Memory.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/knl/Event.h>
#include <ti/sysbios/knl/Semaphore.h>
#include <ti/sysbios/knl/Clock.h>
#include <ti/sysbios/heaps/HeapBuf.h>
#include <ti/sysbios/heaps/HeapMem.h>
#include <ti/sysbios/knl/Event.h>
#include <ti/sysbios/family/arm/v7a/Pmu.h>
#include <ti/sysbios/family/arm/v7r/vim/Hwi.h>
#include <ti/sysbios/utils/Load.h>
#include <ti/common/mmwave_error.h>
/* mmWave SDK Include Files: */
#include <ti/common/sys_common.h>
#include <ti/common/mmwave_sdk_version.h>
#include <ti/drivers/soc/soc.h>
#include <ti/drivers/esm/esm.h>
#include <ti/drivers/pinmux/pinmux.h>
#include <ti/drivers/crc/crc.h>
#include <ti/drivers/gpio/gpio.h>
#include <ti/drivers/mailbox/mailbox.h>
#include <ti/control/mmwave/mmwave.h>
#include <ti/control/dpm/dpm.h>
#include <ti/datapath/dpc/objectdetection/objdethwa/objectdetection.h>
#include <ti/drivers/osal/DebugP.h>
#include <ti/drivers/uart/UART.h>
#include <ti/utils/cli/cli.h>
#include <ti/utils/mathutils/mathutils.h>
#include <ti/utils/cycleprofiler/cycle_profiler.h>
#include <ti/demo/utils/mmwdemo_rfparser.h>
#include <ti/demo/xwr64xx/mmw/mmw_output.h>
#include <ti/drivers/canfd/canfd.h>
#include <ti/demo/xwr64xx/mmw/mmw.h>
/**************************************************************************
*************************** Global Definitions ***************************
**************************************************************************/
volatile uint32_t gTxDoneFlag = 0, gRxDoneFlag = 0, gParityErrFlag = 0;
volatile uint32_t gTxPkts = 0, gRxPkts = 0, gErrStatusInt = 0;
volatile uint32_t iterationCount = 0U;
uint32_t dataLength = 0U;
uint32_t msgLstErrCnt = 0U;
uint32_t gDisplayStats = 0;
uint8_t rxData[64U];
uint32_t txDataLength, rxDataLength;
CANFD_MCANFrameType frameType = CANFD_MCANFrameType_CLASSIC;
static void MCANAppInitParams(CANFD_MCANInitParams* mcanCfgParams);
CANFD_Handle canHandle;
CANFD_MsgObjHandle txMsgObjHandle;
CANFD_MCANMsgObjCfgParams txMsgObjectParams;
extern MmwDemo_MCB gMmwMCB;
/**************************************************************************
*************************** CAN Driver Initialize Function ***********************
**************************************************************************/
static void MCANAppErrStatusCallback(CANFD_Handle handle, CANFD_Reason reason,
CANFD_ErrStatusResp* errStatusResp);
static void MCANAppCallback(CANFD_MsgObjHandle handle, CANFD_Reason reason);
//CANFD_MsgObjHandle rxMsgObjHandle,rxMsgObjHandle2;
void Can_Initalize(void)
{
int32_t errCode = 0;
int32_t retVal = 0;
CANFD_MCANInitParams mcanCfgParams;
CANFD_MCANBitTimingParams mcanBitTimingParams;
CANFD_MCANMsgObjCfgParams rxMsgObjectParams;
CANFD_MCANRxMsgObjRangeCfgParams rxRangeMsgObjectParams;
CANFD_MsgObjHandle rxMsgObjHandle,rxMsgObjHandle2,rxMsgObjHandle3;
gTxDoneFlag = 0;
gRxDoneFlag = 0;
/* Setup the PINMUX to bring out the XWR16xx CAN pins */
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINE14_PADAE,
PINMUX_OUTEN_RETAIN_HW_CTRL,
PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PINE14_PADAE,
SOC_XWR68XX_PINE14_PADAE_CANFD_TX);
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PIND13_PADAD,
PINMUX_OUTEN_RETAIN_HW_CTRL,
PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PIND13_PADAD,
SOC_XWR68XX_PIND13_PADAD_CANFD_RX);
/* Configure the divide value for MCAN source clock */
SOC_setPeripheralClock(gMmwMCB.socHandle, SOC_MODULE_MCAN,
SOC_CLKSOURCE_VCLK, 4U, &errCode);
/* Initialize peripheral memory */
SOC_initPeripheralRam(gMmwMCB.socHandle, SOC_MODULE_MCAN, &errCode);
MCANAppInitParams(&mcanCfgParams);
/* Initialize the CANFD driver */
canHandle = CANFD_init(&mcanCfgParams, &errCode);
if (canHandle == NULL)
{
System_printf(
"Error: CANFD Module Initialization failed [Error code %d]\n",
errCode);
return;
}
/* Configuring 1Mbps and 5Mbps as nominal and data bit-rate respectively
Prop seg: 8
Ph seg 1: 6
Ph Seg2 : 5
Sync jump: 1
BRP(Baud rate Prescaler): 2
Nominal Bit rate = (40)/(((8+6+5)+1)*BRP) = 1Mhz
Timing Params for Data Bit rate:
Prop seg: 2
Ph seg 1: 2
Ph Seg2 : 3
Sync jump: 1
BRP(Baud rate Prescaler): 1
Nominal Bit rate = (40)/(((2+2+3)+1)*BRP) = 5Mhz
*/
mcanBitTimingParams.nomBrp = 0x2U;
mcanBitTimingParams.nomPropSeg = 0x8U;
mcanBitTimingParams.nomPseg1 = 0x6U;
mcanBitTimingParams.nomPseg2 = 0x5U;
mcanBitTimingParams.nomSjw = 0x1U;
mcanBitTimingParams.dataBrp = 0x1U;
mcanBitTimingParams.dataPropSeg = 0x2U;
mcanBitTimingParams.dataPseg1 = 0x2U;
mcanBitTimingParams.dataPseg2 = 0x3U;
mcanBitTimingParams.dataSjw = 0x1U;
/* Configure the CAN driver */
retVal = CANFD_configBitTime(canHandle, &mcanBitTimingParams, &errCode);
if (retVal < 0)
{
System_printf(
"Error: CANFD Module configure bit time failed [Error code %d]\n",
errCode);
return;
}
/* Setup the transmit message object */
txMsgObjectParams.direction = CANFD_Direction_TX;
txMsgObjectParams.msgIdType = CANFD_MCANXidType_29_BIT;
txMsgObjectParams.msgIdentifier = 0xD1;
txMsgObjHandle = CANFD_createMsgObject(canHandle, &txMsgObjectParams,
&errCode);
if (txMsgObjHandle == NULL)
{
System_printf(
"Error: CANFD create Tx message object failed [Error code %d]\n",
errCode);
return;
}
/* Setup the receive message object */
rxMsgObjectParams.direction = CANFD_Direction_RX;
rxMsgObjectParams.msgIdType = CANFD_MCANXidType_29_BIT;//CANFD_MCANXidType_11_BIT;//CANFD_MCANXidType_29_BIT;
rxMsgObjectParams.msgIdentifier = 0x1D1;
rxMsgObjHandle = CANFD_createMsgObject(canHandle, &rxMsgObjectParams,
&errCode);
if (rxMsgObjHandle == NULL)
{
System_printf(
"Error: CANFD create Rx message object failed [Error code %d]\n",
errCode);
return;
}
rxMsgObjectParams.msgIdentifier = 0x1D2;
rxMsgObjHandle2 = CANFD_createMsgObject(canHandle, &rxMsgObjectParams,
&errCode);
if (rxMsgObjHandle2 == NULL)
{
System_printf(
"Error: CANFD create Rx message object failed [Error code %d]\n",
errCode);
return;
}
rxRangeMsgObjectParams.msgIdType = CANFD_MCANXidType_29_BIT;
rxRangeMsgObjectParams.startMsgIdentifier = 0x1D3;
rxRangeMsgObjectParams.endMsgIdentifier = 0x1D5;
rxMsgObjHandle3 = CANFD_createRxRangeMsgObject(canHandle, &rxRangeMsgObjectParams, &errCode);
if (rxMsgObjHandle3 == NULL)
{
System_printf(
"Error: CANFD create range Rx message object failed [Error code %d]\n",
errCode);
return;
}
}
/**************************************************************************
******************** CAN Parameters initialize Function *****************
**************************************************************************/
static void MCANAppInitParams(CANFD_MCANInitParams* mcanCfgParams)
{
/*Intialize MCAN Config Params*/
memset(mcanCfgParams, sizeof(CANFD_MCANInitParams), 0);
mcanCfgParams->fdMode = 0x1U;
mcanCfgParams->brsEnable = 0x1U;
mcanCfgParams->txpEnable = 0x0U;
mcanCfgParams->efbi = 0x0U;
mcanCfgParams->pxhddisable = 0x0U;
mcanCfgParams->darEnable = 0x1U;
mcanCfgParams->wkupReqEnable = 0x1U;
mcanCfgParams->autoWkupEnable = 0x1U;
mcanCfgParams->emulationEnable = 0x0U;
mcanCfgParams->emulationFAck = 0x0U;
mcanCfgParams->clkStopFAck = 0x0U;
mcanCfgParams->wdcPreload = 0x0U;
mcanCfgParams->tdcEnable = 0x1U;
mcanCfgParams->tdcConfig.tdcf = 0U;
mcanCfgParams->tdcConfig.tdco = 8U;
mcanCfgParams->monEnable = 0x0U;
mcanCfgParams->asmEnable = 0x0U;
mcanCfgParams->tsPrescalar = 0x0U;
mcanCfgParams->tsSelect = 0x0U;
mcanCfgParams->timeoutSelect = CANFD_MCANTimeOutSelect_CONT;
mcanCfgParams->timeoutPreload = 0x0U;
mcanCfgParams->timeoutCntEnable = 0x0U;
mcanCfgParams->filterConfig.rrfe = 0x1U;
mcanCfgParams->filterConfig.rrfs = 0x1U;
mcanCfgParams->filterConfig.anfe = 0x1U;
mcanCfgParams->filterConfig.anfs = 0x1U;
mcanCfgParams->msgRAMConfig.lss = 127U;
mcanCfgParams->msgRAMConfig.lse = 64U;
mcanCfgParams->msgRAMConfig.txBufNum = 32U;
mcanCfgParams->msgRAMConfig.txFIFOSize = 0U;
mcanCfgParams->msgRAMConfig.txBufMode = 0U;
mcanCfgParams->msgRAMConfig.txEventFIFOSize = 0U;
mcanCfgParams->msgRAMConfig.txEventFIFOWaterMark = 0U;
mcanCfgParams->msgRAMConfig.rxFIFO0size = 0U;
mcanCfgParams->msgRAMConfig.rxFIFO0OpMode = 0U;
mcanCfgParams->msgRAMConfig.rxFIFO0waterMark = 0U;
mcanCfgParams->msgRAMConfig.rxFIFO1size = 64U;
mcanCfgParams->msgRAMConfig.rxFIFO1waterMark = 64U;
mcanCfgParams->msgRAMConfig.rxFIFO1OpMode = 64U;
mcanCfgParams->eccConfig.enable = 1;
mcanCfgParams->eccConfig.enableChk = 1;
mcanCfgParams->eccConfig.enableRdModWr = 1;
mcanCfgParams->errInterruptEnable = 1U;
mcanCfgParams->dataInterruptEnable = 1U;
mcanCfgParams->appErrCallBack = MCANAppErrStatusCallback;
mcanCfgParams->appDataCallBack = MCANAppCallback;
}
static void MCANAppCallback(CANFD_MsgObjHandle handle, CANFD_Reason reason)
{
int32_t errCode, retVal;
uint32_t id;
CANFD_MCANFrameType rxFrameType;
CANFD_MCANXidType rxIdType;
if (reason == CANFD_Reason_TX_COMPLETION)
{
{
gTxPkts++;
gTxDoneFlag = 1;
return;
}
}
if (reason == CANFD_Reason_RX)
{
{
/* Reset the receive buffer */
memset(&rxData, 0, sizeof(rxData));
dataLength = 0;
retVal = CANFD_getData(handle, &id, &rxFrameType, &rxIdType,
&rxDataLength, &rxData[0], &errCode);
if (retVal < 0)
{
// System_printf ("Error: CAN receive data for iteration %d failed [Error code %d]\n", iterationCount, errCode);
return;
}
if (rxFrameType != frameType)
{
// System_printf ("Error: CAN received incorrect frame type Sent %d Received %d for iteration %d failed\n", frameType, rxFrameType, iterationCount);
return;
}
/* Validate the data */
gRxPkts++;
gRxDoneFlag = 1;
return;
}
}
if (reason == CANFD_Reason_TX_CANCELED)
{
{
gTxPkts++;
gTxDoneFlag = 1;
gRxDoneFlag = 1;
return;
}
}
}
static void MCANAppErrStatusCallback(CANFD_Handle handle, CANFD_Reason reason,
CANFD_ErrStatusResp* errStatusResp)
{
/*Record the error count */
gErrStatusInt++;
return;
}
int32_t MCANApp_transmitDataBuffer(uint32_t msg_id, CANFD_MCANFrameType frameType,
uint32_t dataLength, const uint8_t* txmsg)
{
int32_t errCode;
static int32_t retVal;
int32_t index = 0;
uint32_t len = dataLength;
if(frameType == CANFD_MCANFrameType_FD)
{
Task_sleep(1);
while(len > 64U)
{
retVal = CANFD_transmitData (txMsgObjHandle, msg_id, CANFD_MCANFrameType_FD, 64U, &txmsg[index],
&errCode);
index = index + 64U;
len = len - 64U;
Task_sleep(1);
}
retVal = CANFD_transmitData (txMsgObjHandle, msg_id, CANFD_MCANFrameType_FD, len, &txmsg[index],
&errCode);
}
else
{
while(len > 8U)
{
retVal = CANFD_transmitData (txMsgObjHandle, msg_id,
CANFD_MCANFrameType_CLASSIC, 8U, &txmsg[index], &errCode);
if (retVal < 0)
{
continue;
}
index = index + 8U;
len = len - 8U;
}
retVal = CANFD_transmitData (txMsgObjHandle, msg_id, CANFD_MCANFrameType_CLASSIC,
len, &txmsg[index], &errCode);
/* while(retVal < 0)
{
retVal = CANFD_transmitData (txMsgObjHandle, msg_id, CANFD_MCANFrameType_CLASSIC, len,
&txmsg[index], &errCode);
}*/
}
return 0;
}
void MCANApp_testTask(UArg arg0, UArg arg1)
{
/* int32_t retVal;
DPM_Buffer resultBuffer;
DPC_ObjectDetection_ExecuteResultExportedInfo exportInfo;
DPC_ObjectDetection_ExecuteResult *result;*/
uint8_t txmsg[8] = {0,1,2,3,4,5,6,7};
while (1)
{
// MCANApp_transmitDataBuffer(1001, CANFD_MCANFrameType_CLASSIC, 8, txmsg);
Task_sleep(1000);
}
}