Other Parts Discussed in Thread: MMWAVE-SDK
Hello,
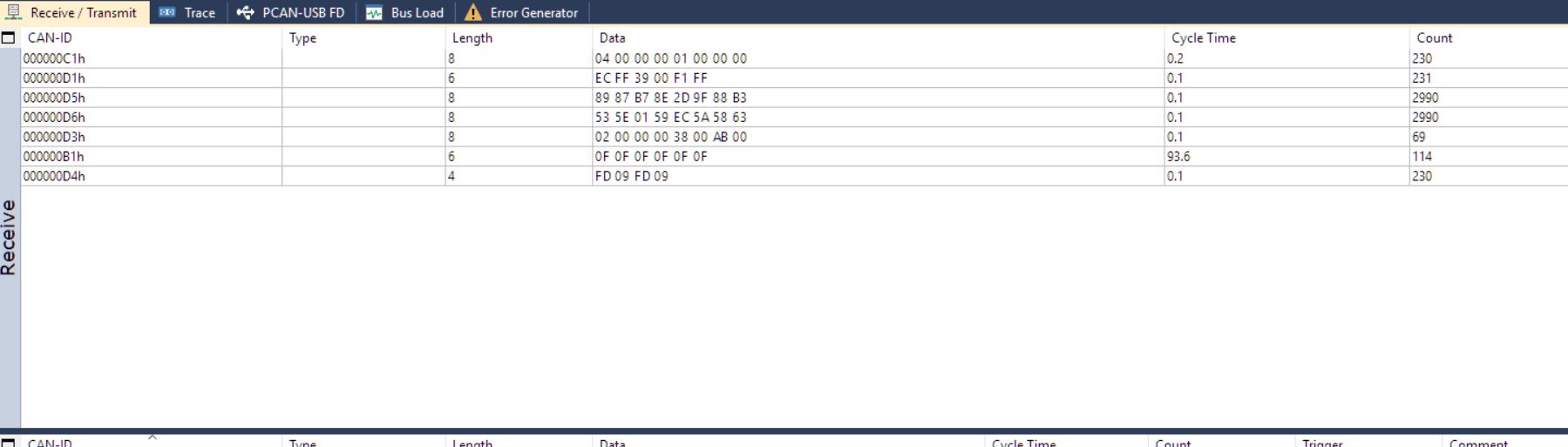
I'm attempting to use the Object Detection over CAN lab, but I only get Error Active status on the bus.
Using the ODOC lab 5 from Automotive Toolbox 2.8, I've changed the CAN frame type to Classic and compiled with SDK 2.1
I'm using AWR1642BOOST-ODS ES2 RevB, so I've flicked the selector switch to CAN ON. I don't believe I need to make any further hardware modifations to the PCB to enable CAN.
My CAN interface is Kvaser Leaf Light V2 which only supports CAN2.0B (no CAN FD) and 1Mb/s max bus speed. I don't have access to a Peak interface to test with the supplied visualiser. I also, get Error frame using a logic anlyzer with CAN protocol.
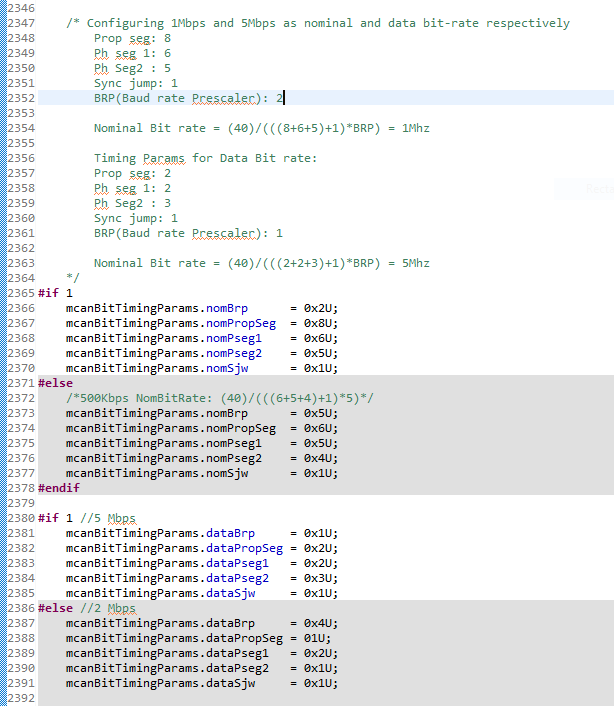
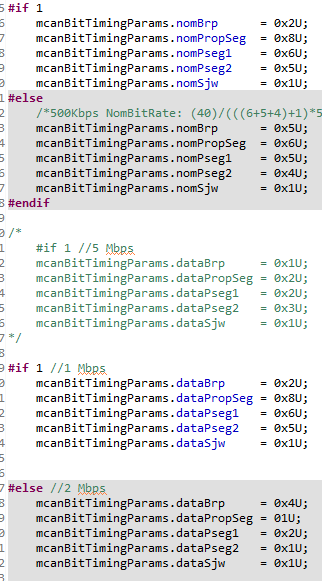
In MATLAB, I need to configure the bus speed:
configBusSpeed( sets the speed of the CAN channel canch,busspeed,SJW,TSeg1,TSeg2,numsamples)canch to busspeed using the specified bit timing calculation factors to control the timing in an advanced form.
I've tried with SJW = 1, TSeg1 = 4, TSeg2 = 3 and also SJW = 1, TSeg1 = 5, TSeg2 = 2
Using a multimeter, both CAN_L and CAN_H are 2.5V, there is no change.
I don't know what else I can test to debug the issue.
Some questions:
1. The max bus speed for MCAN is stated as 5Mb/s. Does MCAN reduce the bus speed to 1Mb/s when it's in Classic CAN mode? If not, can I make it do so?
2. Is the ODOC demo even applicable for the BOOST-ODS EVM? Do I need to instead modify the Obstacle Detection Lab 4 to transmit using DCAN? If so, can I still use the J3 CAN connector or does it require using the GPIO pins?
3. Can you please advise any other method I can use to access detections over CAN 2.0 with the AWR1642BOOST-ODS?
Regards
Brant