Hi all,
I'm working on the new 3D demo available in ITB 4.1 for ODS sensor. I'm having trouble with understanding the staticBoundaryBox and boundaryBox parameters and tuning the sensor with those parameters. They aren't the same as old SceneryParam.
I have referred the new documentation which states:
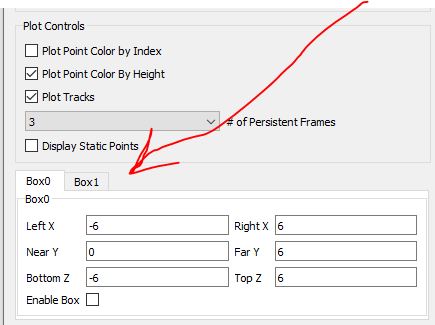
- staticBoundaryBox [-X] [X] [NearY] [FarY] [-Z] [Z]
- This sets boundaries where static points can be used by the tracker and tracks are allowed to become static. Each value denotes an edge of the 3D cube. Currently, it is recommend to keep NearY greater than or equal to 2.
- boundaryBox [-X] [X] [NearY] [FarY] [-Z] [Z]
- This sets boundaries where tracks can exists. Only points inside the box will be used by the tracker. Each value denotes an edge of the 3D cube.
but I'm still confused. I also don't need my targets to be static so how do I eliminate that parameters or how do I unset it?
Can anyone help me with this?
Regards,
radha.