Other Parts Discussed in Thread: MMWAVEICBOOST,
Hello,
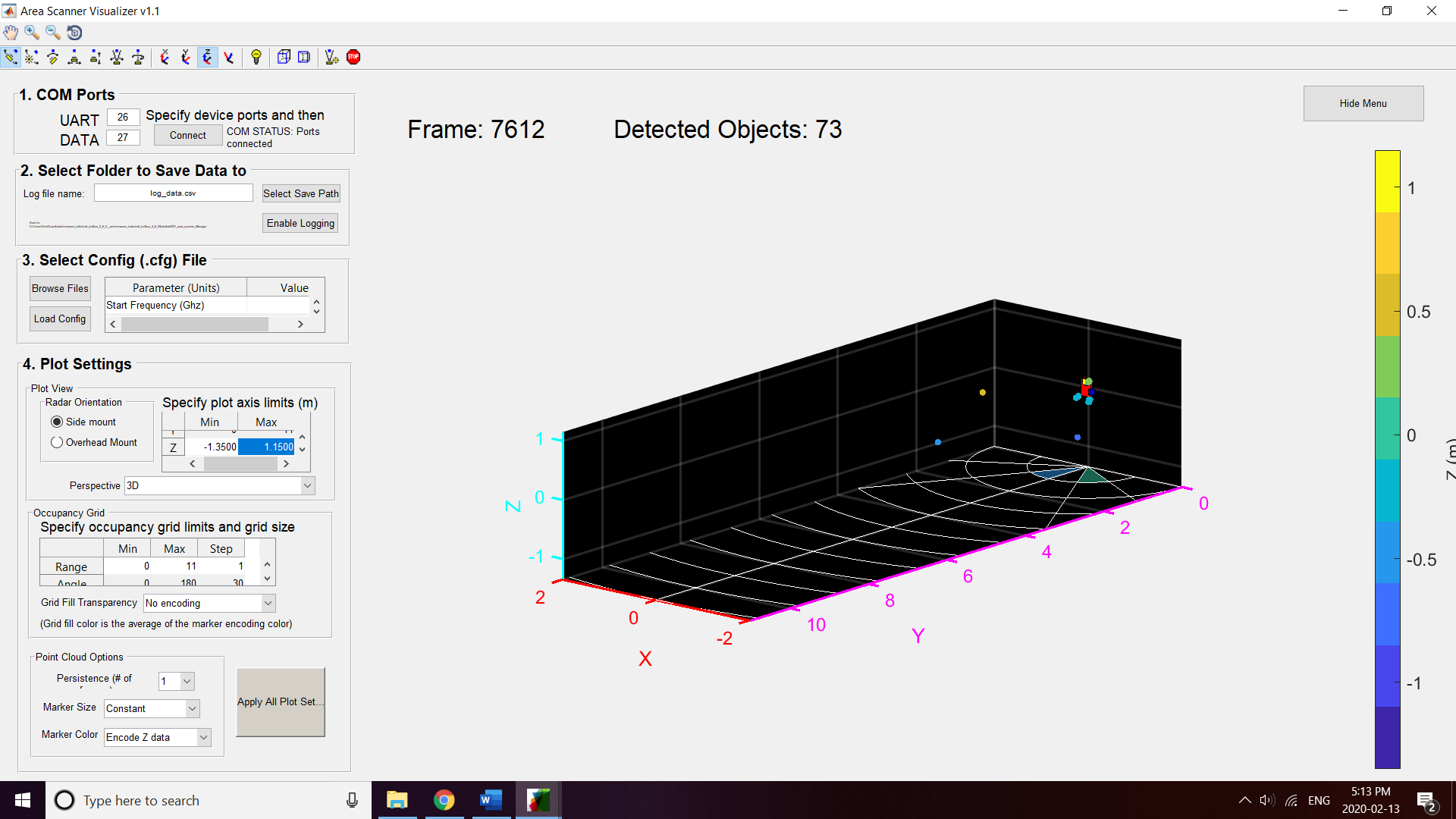
Now that I have gotten the Area Scanner GUI (Industrial Toolbox 3.6.2) working, I have a new problem. I can only get it to detect me when I am motionless at a distance of 3 meters (at 0 degrees azimuth). After this there are no points in the GUI. When I am moving, it will detect me at around 5m. I am using IWR6843ISK-ODS with MMWAVEICBOOST. The firmware on the chip is toolbox \mmwave_industrial_toolbox_4_2_0__win\mmwave_industrial_toolbox_4_2_0\labs\out_of_box_demo\68xx_ods_point_cloud_demo\prebuilt_binaries. The chirp config is \mmwave_industrial_toolbox_4_2_0__win\mmwave_industrial_toolbox_4_2_0\labs\out_of_box_demo\68xx_ods_point_cloud_demo\chirp_configs
This is unexpected because the chirp config has max distance 9.62m. I restarted the demo with no success. I tried some other chirp configurations without success. Do you know why it only sees 3m away? I've attached a picture of the result of me standing at 3m. Even there it has trouble finding points.