Other Parts Discussed in Thread: IWR1443
Hi,
I bought TI's IWR1443 BOOST EVM a few months ago and I am studyding TI's mmWave materials to do some designs using IWR1443. I have studied TI's mmWave training series, the first topic of which is Introduction to mmwave Sensing: FMCW Radars. The corresponding PPT of the training video is as shown below.
Introduction to mmwave Sensing FMCW Radars.pdf
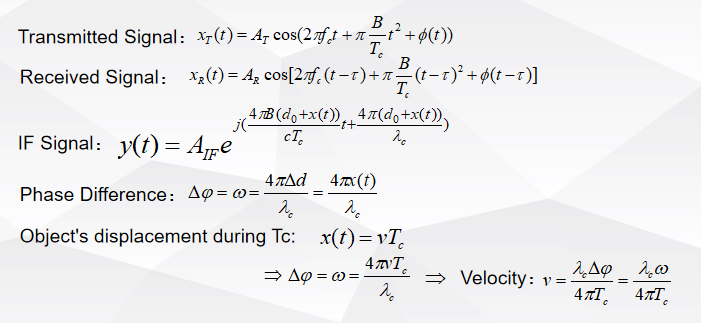
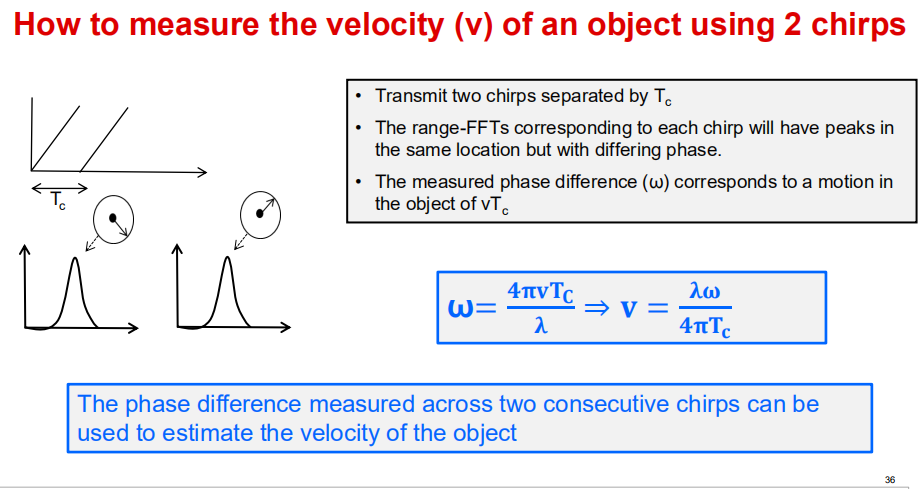
But I am confused about module 3: Velocity Estimation. The PPT as below shows that ω is the phase difference of the IF signal, and we can get the value of IF signal's phase using 1D-FFT,then we can perform an operation of difference between two adjacent phases of two consecutive chirps. So, according to the velocity estimation formula, we can compute the velocity of one object just by 1D-FFT. I don't understand why there is a need for 2D-FFT.Is the 2D-FFT just for the situation that there are two objects equidistant from the radar? If objects are at different ranges from radar, is 1D-FFT enough to compute the velocities?
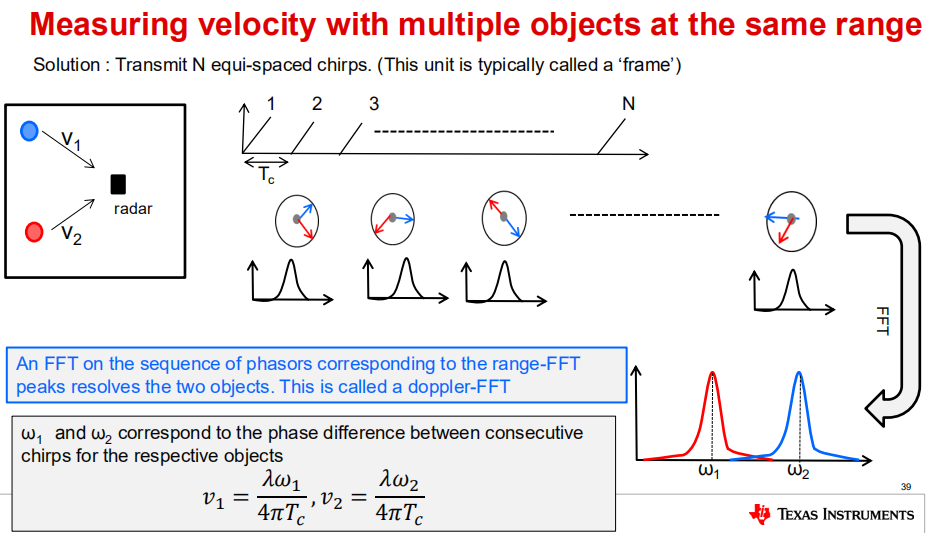
Besides,I am also confused about this slide shown as above.Here,the phase difference ω1 and ω2 are the result of 2D-FFT when multiple objects are at the same range from radar.If the phase of one object's IF signal do not rotate at certain angular frequency but changes according to the law of primary function, then just for this object, there will be more than one ω in the spectrogram of 2D-FFT rather than one. If then, how can we distinguish different objects' angular frequency in 2D-FFT's spectrogram?
Best Regards,
Xia Dai