


Other Parts Discussed in Thread: BOOSTXL-PGA460, PGA460
Hi,
I am using BOOSTXL-PGA460 EVM for my project. I tested the EVM with the Murata MA58MF14-7N.
My product demands object sensing in the range of 20cm-50cm. The object is a flat(such as wall).
My product demands object sensing in the range of 20cm-50cm. The object is a flat(such as wall).
Doing some tests here on the bench, There was a bit of a discrepancy(about 3cm-4cm).
Would there be any way to solve this distance error.
Would there be any way to solve this distance error.
Are the results within the margin of error.
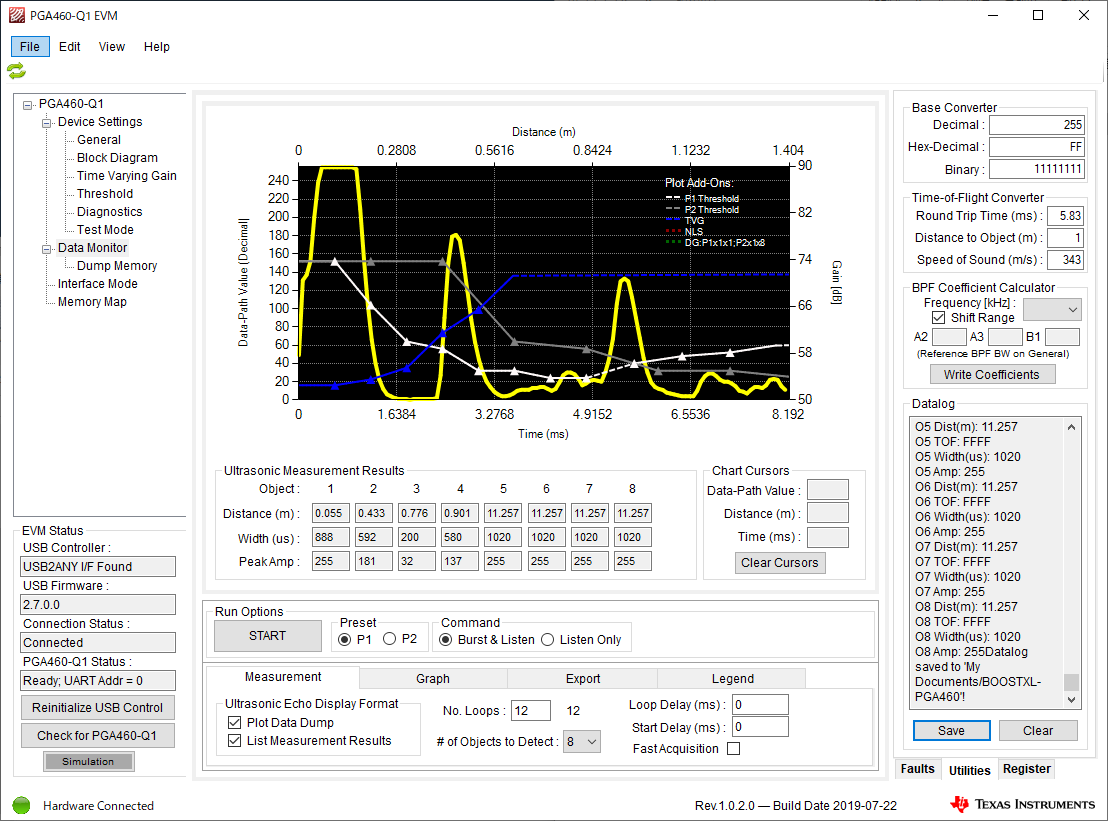
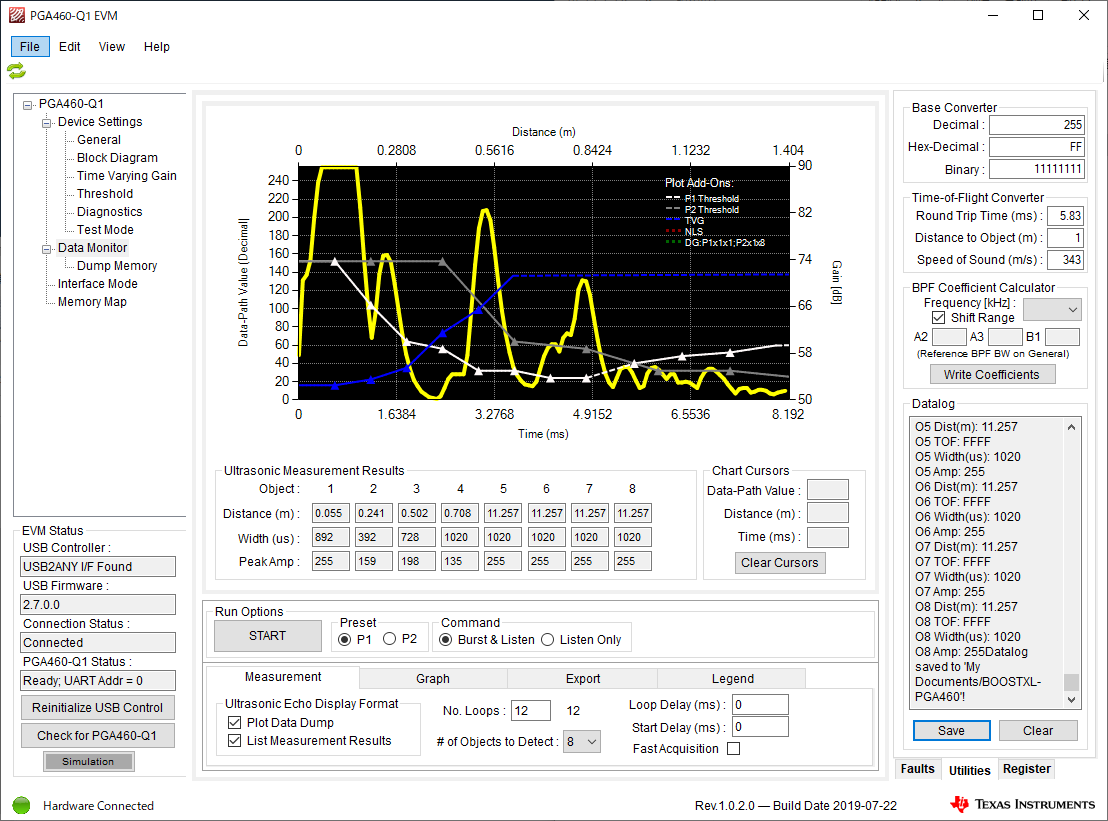
The GUI Echo data dump capture image is shown below:
1)Object is physically at 50cm:

2)Object is physically at 40cm:

4)Object is physically at 20cm:
The configuration diagram is shown below.
1)General

Please find attached here with my configuration file also.
;GRID_USER_MEMSPACE 00 (USER_DATA1),00 01 (USER_DATA2),00 02 (USER_DATA3),00 03 (USER_DATA4),00 04 (USER_DATA5),00 05 (USER_DATA6),00 06 (USER_DATA7),00 07 (USER_DATA8),00 08 (USER_DATA9),00 09 (USER_DATA10),00 0A (USER_DATA11),00 0B (USER_DATA12),00 0C (USER_DATA13),00 0D (USER_DATA14),00 0E (USER_DATA15),00 0F (USER_DATA16),00 10 (USER_DATA17),00 11 (USER_DATA18),00 12 (USER_DATA19),00 13 (USER_DATA20),00 14 (TVGAIN0),44 15 (TVGAIN1),44 16 (TVGAIN2),44 17 (TVGAIN3),08 18 (TVGAIN4),64 19 (TVGAIN5),9A 1A (TVGAIN6),98 1B (INIT_GAIN),40 1C (FREQUENCY),8F 1D (DEADTIME),80 1E (PULSE_P1),06 1F (PULSE_P2),10 20 (CURR_LIM_P1),0E 21 (CURR_LIM_P2),71 22 (REC_LENGTH),19 23 (FREQ_DIAG),00 24 (SAT_FDIAG_TH),EE 25 (FVOLT_DEC),7C 26 (DECPL_TEMP),4F 27 (DSP_SCALE),00 28 (TEMP_TRIM),00 29 (P1_GAIN_CTRL),00 2A (P2_GAIN_CTRL),18 2B (EE_CRC),3B 40 (EE_CNTRL),00 41 (BPF_A2_MSB),8A 42 (BPF_A2_LSB),0C 43 (BPF_A3_MSB),F9 44 (BPF_A3_LSB),A5 45 (BPF_B1_MSB),03 46 (BPF_B1_LSB),2D 47 (LPF_A2_MSB),7E 48 (LPF_A2_LSB),67 49 (LPF_B1_MSB),00 4A (LPF_B1_LSB),CD 4B (TEST_MUX),00 4C (DEV_STAT0),80 4D (DEV_STAT1),00 5F (P1_THR_0),44 60 (P1_THR_1),44 61 (P1_THR_2),44 62 (P1_THR_3),44 63 (P1_THR_4),55 64 (P1_THR_5),55 65 (P1_THR_6),9C 66 (P1_THR_7),D0 67 (P1_THR_8),72 68 (P1_THR_9),10 69 (P1_THR_10),63 6A (P1_THR_11),28 6B (P1_THR_12),30 6C (P1_THR_13),34 6D (P1_THR_14),3C 6E (P1_THR_15),00 6F (P2_THR_0),77 70 (P2_THR_1),77 71 (P2_THR_2),77 72 (P2_THR_3),77 73 (P2_THR_4),78 74 (P2_THR_5),88 75 (P2_THR_6),9C 76 (P2_THR_7),D0 77 (P2_THR_8),72 78 (P2_THR_9),10 79 (P2_THR_10),63 7A (P2_THR_11),28 7B (P2_THR_12),30 7C (P2_THR_13),34 7D (P2_THR_14),3C 7E (P2_THR_15),00 7F (THR_CRC),3A EOF
Kindly help me in resolving this issue.
My best regards.
My best regards.

