Other Parts Discussed in Thread: PGA460, BOOSTXL-PGA460
Tool/software: Code Composer Studio
Dear coleagues,
Actually I'm work with a PGA460 applied in a industrial ultrasonic sensor and I don't know why I can not measure more them 5.61 (half of maximum PGA distance in a normal application). When I use a UMR Command and MSB value are locked at 0x41 and LSB changes correctaly.
I'm use a 80khz transducer and want detect up to 8m.
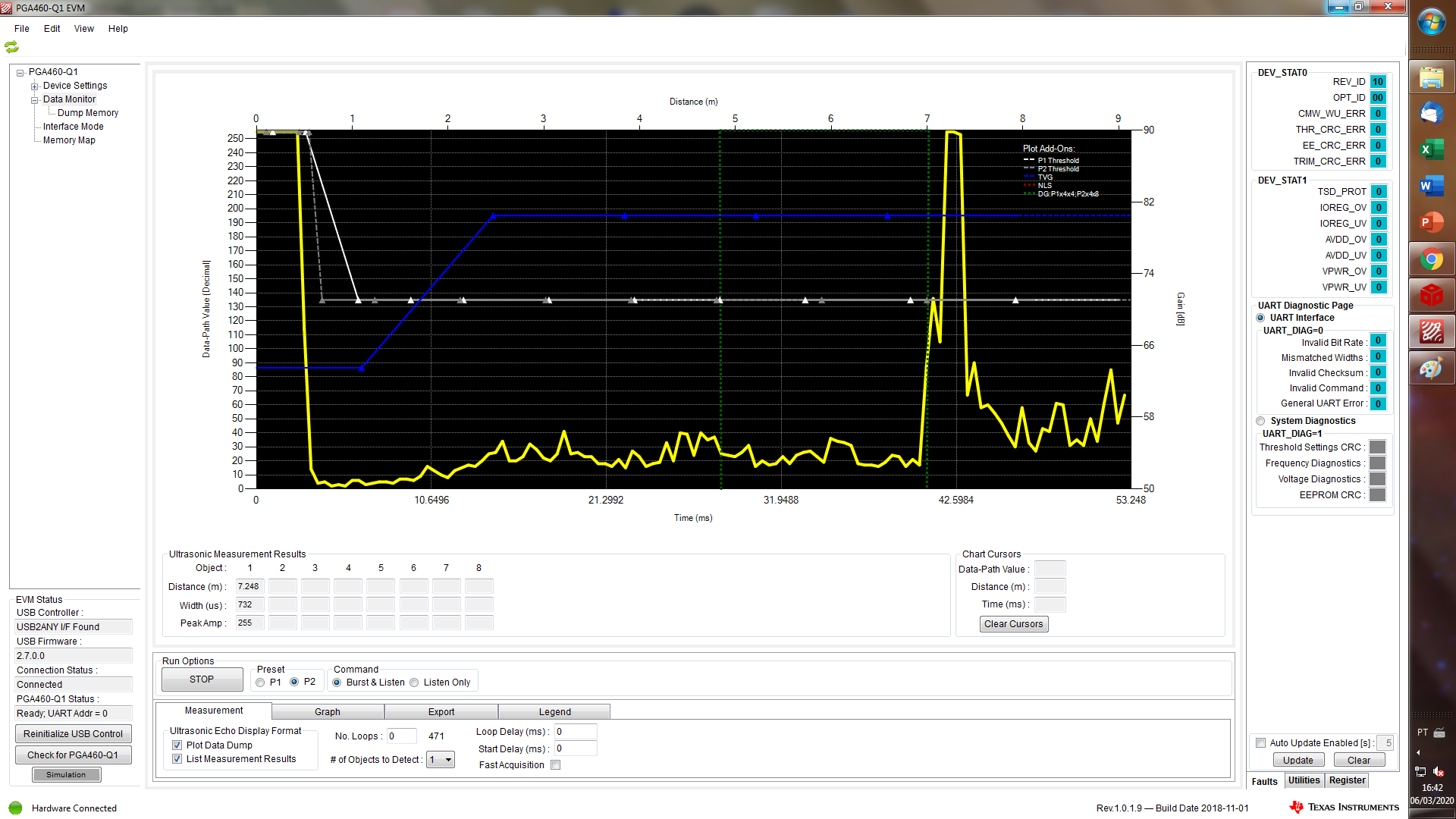
Below my memory data and part of code used to transmit.
#define P1BL 0x00 // Burst and Listen (Preset 1) #define P2BL 0x01 // Burst and Listen (Preset 2) #define P1LO 0x02 // Listen Only (Preset 1) #define P2LO 0x03 // Listen Only (Preset 2) #define TNLM 0x04 // Temperature and Noise-level measurement #define UMR 0x05 // Ultrasonic Measurement Result #define TNLR 0x06 // Temperature and noise level result #define TEDD 0x07 // Transducer echo data dump #define SD 0x08 // System diagnostics #define SRR 0x09 // Register read #define SRW 0x0A // Register write #define EEBR 0x0B // EEPROM bulk read #define EEBW 0x0C // EEPROM bulk write #define TVGBR 0x0D // Time-varying-gain bulk read #define TVGBW 0x0E // Time-varying-gain bulk write #define THRBR 0x0F // Threshold bulk read #define THRBW 0x10 // Threshold bulk write // Broadcast -- device will execute command irrespecive of UART address field #define BC_P1BL 0x11 // Burst and listen (Preset 1) #define BC_P2BL 0x12 // Burst and listen (Preset 2) #define BC_P1LO 0x13 // Listen only (Preset 1) #define BC_P2LO 0x14 // Listen only (Preset 2) #define BC_TNLM 0x15 // Temperature and noise-level measurement #define BC_SRW 0x16 // Register write #define BC_EEBW 0x17 // EEPROM bulk write #define BC_TVGBW 0x18 // Time varying-gain bulk write #define BC_THRBW 0x19 // Threshold bulk write // Addresses and Settings #define EE_CNTRL_ADDR 0x40 #define EE_UNLOCK_ST1 0x68 #define EE_UNLOCK_ST2 0x69 // EEPROM -- non-volatile #define USER_DATA1 0x0 //reg addr 0x0 #define USER_DATA2 0x0 //reg addr 0x1 #define USER_DATA3 0x0 //reg addr 0x2 #define USER_DATA4 0x0 //reg addr 0x3 #define USER_DATA5 0x0 //reg addr 0x4 #define USER_DATA6 0x0 //reg addr 0x5 #define USER_DATA7 0x0 //reg addr 0x6 #define USER_DATA8 0x0 //reg addr 0x7 #define USER_DATA9 0x0 //reg addr 0x8 #define USER_DATA10 0x0 //reg addr 0x9 #define USER_DATA11 0x0 //reg addr 0x0A #define USER_DATA12 0x0 //reg addr 0x0B #define USER_DATA13 0x0 //reg addr 0x0C #define USER_DATA14 0x0 //reg addr 0x0D #define USER_DATA15 0x0 //reg addr 0x0E #define USER_DATA16 0x0 //reg addr 0x0F #define USER_DATA17 0x0 //reg addr 0x10 #define USER_DATA18 0x0 //reg addr 0x11 #define USER_DATA19 0x0 //reg addr 0x12 #define USER_DATA20 0x0 //reg addr 0x13 #define TVGAIN0 0xEE //reg addr 0x14 #define TVGAIN1 0xFF //reg addr 0x15 #define TVGAIN2 0xFF //reg addr 0x16 #define TVGAIN3 0xB2 //reg addr 0x17 #define TVGAIN4 0xCB //reg addr 0x18 #define TVGAIN5 0x2C //reg addr 0x19 #define TVGAIN6 0xB0 //reg addr 0x1A #define INIT_GAIN 0x4A //reg addr 0x1B #define FREQUENCY 0xFA //reg addr 0x1C #define DEADTIME 0xFF //reg addr 0x1D #define PULSE_P1 0x3F //reg addr 0x1E #define PULSE_P2 0x1F //reg addr 0x1F #define CURR_LIM_P1 0x3F //reg addr 0x20 #define CURR_LIM_P2 0x7F //reg addr 0x21 #define REC_LENGTH 0x3C //reg addr 0x22 #define FREQ_DIAG 0x21 //reg addr 0x23 #define SAT_FDIAG_TH 0x22 //reg addr 0x24 #define FVOLT_DEC 0x69 //reg addr 0x25 #define DECPL_TEMP 0x0F //reg addr 0x26 #define DSP_SCALE 0x00 //reg addr 0x27 #define TEMP_TRIM 0x0 //reg addr 0x28 #define P1_GAIN_CTRL 0x12 //reg addr 0x29 #define P2_GAIN_CTRL 0xDA //reg addr 0x2A #define EE_CRC 0xDB //reg addr 0x2B // Register-based -- volatile #define EE_CNTRL 0x0 //reg addr 0x40 #define BPF_A2_MSB 0x91 //reg addr 0x41 #define BPF_A2_LSB 0x3A //reg addr 0x42 #define BPF_A3_MSB 0xF9 //reg addr 0x43 #define BPF_A3_LSB 0xA5 //reg addr 0x44 #define BPF_B1_MSB 0x03 //reg addr 0x45 #define BPF_B1_LSB 0x2D //reg addr 0x46 #define LPF_A2_MSB 0x7E //reg addr 0x47 #define LPF_A2_LSB 0x67 //reg addr 0x48 #define LPF_B1_MSB 0x00 //reg addr 0x49 #define LPF_B1_LSB 0xCD //reg addr 0x4A #define TEST_MUX 0xCD //reg addr 0x4B #define DEV_STAT0 0x80 //reg addr 0x4C #define DEV_STAT1 0x0 //reg addr 0x4D // Register-based -- volatile #define P1_THR_0 0x69 //reg addr 0x5F #define P1_THR_1 0xBB //reg addr 0x60 #define P1_THR_2 0xBD //reg addr 0x61 #define P1_THR_3 0xDD //reg addr 0x62 #define P1_THR_4 0xDE //reg addr 0x63 #define P1_THR_5 0xEE //reg addr 0x64 #define P1_THR_6 0xFF //reg addr 0x65 #define P1_THR_7 0xE1 //reg addr 0x66 #define P1_THR_8 0x08 //reg addr 0x67 #define P1_THR_9 0x42 //reg addr 0x68 #define P1_THR_10 0x10 //reg addr 0x69 #define P1_THR_11 0x87 //reg addr 0x6A #define P1_THR_12 0x87 //reg addr 0x6B #define P1_THR_13 0x87 //reg addr 0x6C #define P1_THR_14 0x87 //reg addr 0x6D #define P1_THR_15 0x07 //reg addr 0x6E #define P2_THR_0 0x49 //reg addr 0x6F #define P2_THR_1 0x45 //reg addr 0x70 #define P2_THR_2 0xBD //reg addr 0x71 #define P2_THR_3 0xDD //reg addr 0x72 #define P2_THR_4 0xDE //reg addr 0x73 #define P2_THR_5 0xEE //reg addr 0x74 #define P2_THR_6 0xFF //reg addr 0x75 #define P2_THR_7 0xFF //reg addr 0x76 #define P2_THR_8 0x08 //reg addr 0x77 #define P2_THR_9 0x42 //reg addr 0x78 #define P2_THR_10 0x10 //reg addr 0x79 #define P2_THR_11 0x87 //reg addr 0x7A #define P2_THR_12 0x87 //reg addr 0x7B #define P2_THR_13 0x87 //reg addr 0x7C #define P2_THR_14 0x87 //reg addr 0x7D #define P2_THR_15 0x07 //reg addr 0x7E #define THR_CRC 0xE4 //reg addr 0x7F
I have been change these values using a Texas Board with PGA460-Q1 EVM. When I saw a consistent signal I made a copy to these data to use in my proprietary hardware.
Using a datamonitor I sow a good signal to 8m or more.
In my proprietary board, until 5.61 meter works very well but MSB dont change. I don't believe in hardware problems ou poor signal. I wait 60ms to each burst and listen.
Part of code:
if ((getTime_ms() - lastexection) >= 60)// roda a cada 60ms quando selecionado modo 0
{
uint8_t buf_tx[4] = {SYNCBYTE, MODE_LONG_RANGE, 0x01, 0xFF};
uint8_t checksum = calc_checksum4(&buf_tx[1], 2);
buf_tx[3] = checksum;
unsigned char n=0;
for(n=0;n<4;n++)
{
EUSCI_A_UART_transmitData(EUSCI_A0_BASE, buf_tx[n]);// gero pulso para transmissão
}
GPIO_toggleOutputOnPin(GPIO_PORT_P1,GPIO_PIN6);// led verde
lastexection = getTime_ms(); // get the current time
request_results();
MSB=buf_distancia[1];
LSB=buf_distancia[2];
LOBULO=buf_distancia[3];
AMPLITUDE=buf_distancia[4];
}
//request_results();
//MSB=buf_distancia[1];
//LSB=buf_distancia[2];
//LOBULO=buf_distancia[3];
//AMPLITUDE=buf_distancia[4];
plobulo=LOBULO*100/255;
pamplitute = AMPLITUDE*100/255;
//distancia = ((343/2)*(((MSB<<8)+LSB)*0.000001))+((343/2)*(31*(1/80000))); // formula sem compensação da variação da temperatura
distancia = (((331/2)+0.3*tempok)*(((MSB<<8)+LSB)*0.000001))+(((331/2)+0.3*tempok)*(31*(1/80000))); // formula com compensação da variação da temperatura
What am I doing wrong?
Thanks for all your help!
Reinaldo Borsato