Hi,
I am reading 3D people counting lab's FW source code and I have a question about azimuth and elevation estimation processes.
In order to use capon algorithm for azimuth and elevation estimations, it is making invRn matrices respectively.
For azimuth estimation, the invRn size is 4x4, using #0/3/4/7 virtual antenna signals.
On the other hand, for elevation estimation, the invRn size is 12x12, using #0/1/2/3/4/5/6/7/8/9/10/11 virtual antenna signals.
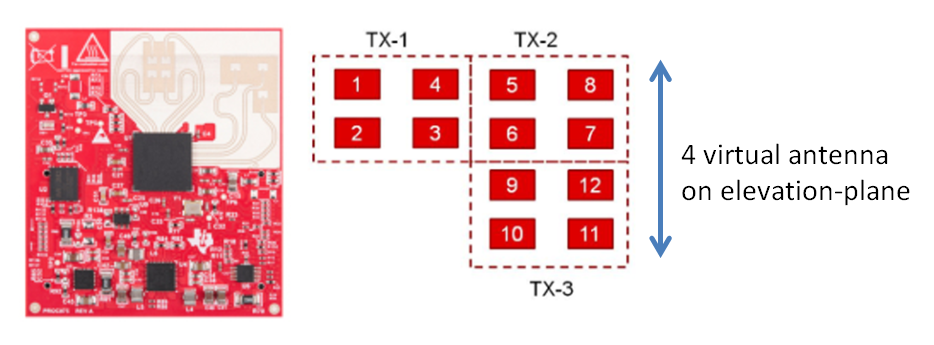
Regarding the layout of antenna on IWR6843ISK-ODS, I think the size of invRn for elevation estimation will also be 4x4(virtual antenna :#4/5/8/9).
What makes this difference between 4x4 and 12x12?
Best regards,
Fields