Other Parts Discussed in Thread: HDC2010
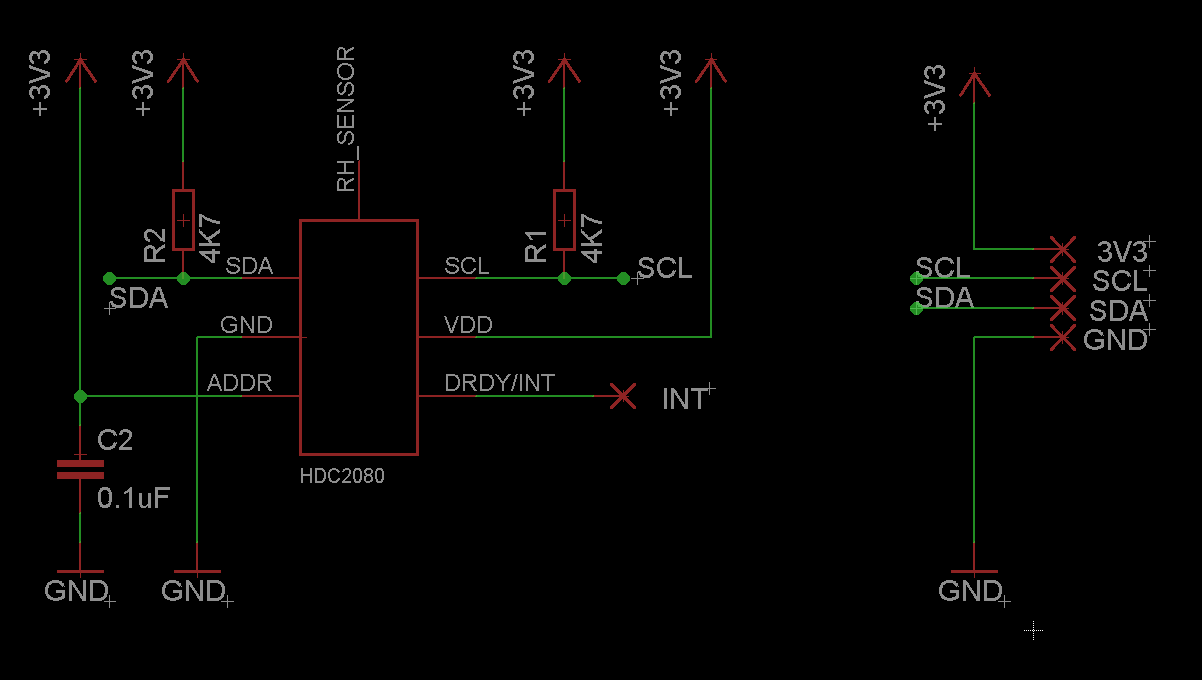
Hi, i am studying with I2C and HDC2080. And I'm using stm32f030c6t, but i can not understand how to do this. I also read datasheet. And here is my example. Where am i doing wrong?
#include "stdint.h"
#include "stm32f0xx.h"
#define ADDR_I2C 0x82 //DHC2080 i2c Address
//// Constants for setting measurement resolution
#define FOURTEEN_BIT 0
#define ELEVEN_BIT 1
#define NINE_BIT 2
//// Constants for setting sensor mode
#define TEMP_AND_HUMID 0
#define TEMP_ONLY 1
#define HUMID_ONLY 2
#define ACTIVE_LOW 0
#define ACTIVE_HIGH 1
#define LEVEL_MODE 0
#define COMPARATOR_MODE 1
///////////////////////////////////////
#define TEMP_LOW 0x00
#define TEMP_HIGH 0x01
#define HUMID_LOW 0x02
#define HUMID_HIGH 0x03
#define INTERRUPT_DRDY 0x04
#define TEMP_MAX 0x05
#define HUMID_MAX 0x06
#define INTERRUPT_CONFIG 0x07
#define TEMP_OFFSET_ADJUST 0x08
#define HUM_OFFSET_ADJUST 0x09
#define TEMP_THR_L 0x0A
#define TEMP_THR_H 0x0B
#define HUMID_THR_L 0x0C
#define HUMID_THR_H 0x0D
#define CONFIG 0x0E
#define MEASUREMENT_CONFIG 0x0F
#define MID_L 0xFC
#define MID_H 0xFD
#define DEVICE_ID_L 0xFE
#define DEVICE_ID_H 0xFF
typedef enum
{
MANUAL,
TWO_MINS,
ONE_MINS,
TEN_SECONDS,
FIVE_SECONDS,
ONE_HZ,
TWO_HZ,
FIVE_HZ,
}HDC2080_RATE_t;
extern HDC2080_RATE_t HDC2080_rate;
extern uint32_t delayCounter;
extern uint8_t delayFlag;
extern void Start_HDC2080();
extern void Reset_HDC2080();
extern void HDC2080_setMeasurementMode(int mode);
extern void HDC2080_setRate(int rate);
extern void HDC2080_triggerMeasurement();
extern void HDC2080_setTempRes(int resolution);
extern void HDC2080_setHumidRes(int resolution);
extern void HDC2080_setHighTemp(float temp);
extern void HDC2080_setLowTemp(float temp);
extern void HDC2080_setHighHumidity(float hum);
extern void HDC2080_setLowHumidity(float hum);
extern int16_t HDC2080_readTemp();
extern int16_t HDC2080_readHumidity();
extern uint8_t HDC2080_readReg(uint8_t reg);
extern void HDC2080_openReg(uint8_t reg);
extern void HDC2080_writeReg(uint8_t reg, uint8_t data);
extern void DelayinMs();
////////////////////////////////////////////////////////////////////////////////
#include "HDC2080.h"
//Private Variables
HDC2080_RATE_t HDC2080_rate;
uint32_t delayCounter = 0;
uint8_t delayFlag = 1;
//Function Prototypes
void Start_HDC2080();
void Reset_HDC2080();
void HDC2080_setMeasurementMode(int mode);
void HDC2080_setRate(int rate);
void HDC2080_triggerMeasurement();
void HDC2080_setTempRes(int resolution);
void HDC2080_setHumidRes(int resolution);
void HDC2080_setHighTemp(float temp);
void HDC2080_setLowTemp(float temp);
void HDC2080_setHighHumidity(float hum);
void HDC2080_setLowHumidity(float hum);
int16_t HDC2080_readTemp();
int16_t HDC2080_readHumidity();
uint8_t HDC2080_readReg(uint8_t reg);
void HDC2080_openReg(uint8_t reg);
void HDC2080_writeReg(uint8_t reg, uint8_t data);
void DelayinMs();
void Start_HDC2080()
{
Reset_HDC2080(); // Begin with a device reset
HDC2080_setHighTemp(28); // High temperature of 28C
HDC2080_setLowTemp(22); // Low temperature of 22C
HDC2080_setHighHumidity(55); // High humidity of 55%
HDC2080_setLowHumidity(40); // Low humidity of 40%
HDC2080_setMeasurementMode(TEMP_AND_HUMID); // Set measurements to temperature and humidity
HDC2080_setRate(ONE_HZ); // Set measurement frequency to 1 Hz
HDC2080_setTempRes(FOURTEEN_BIT);
HDC2080_setHumidRes(FOURTEEN_BIT);
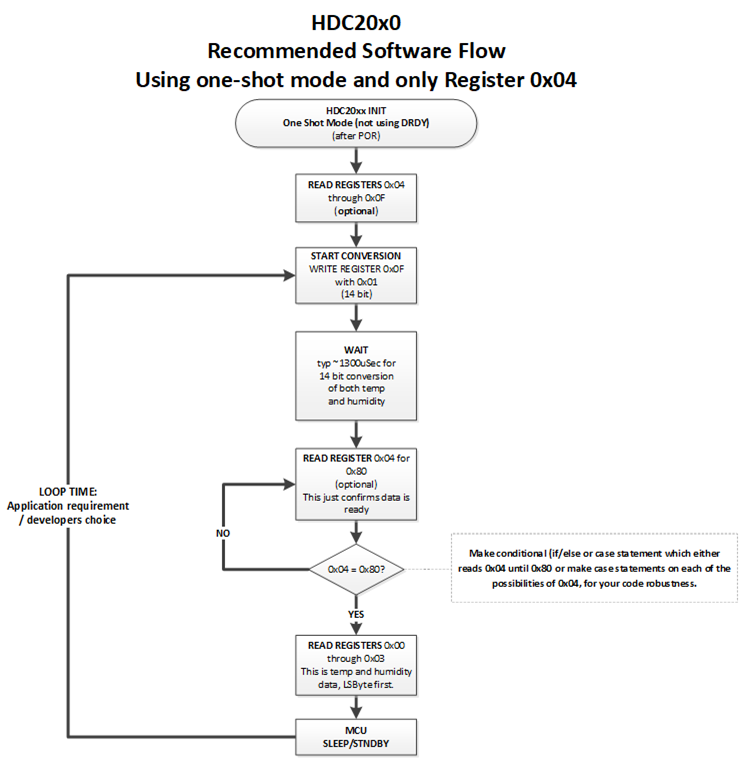
HDC2080_triggerMeasurement();
}
void Reset_HDC2080()
{
uint8_t configContents;
configContents = HDC2080_readReg(CONFIG);
configContents = (configContents | 0x80);
HDC2080_writeReg(CONFIG, configContents);
delayFlag = 0;
DelayinMs(25); //50ms delay
while (delayFlag == 0);
}
void HDC2080_setMeasurementMode(int mode)
{
uint8_t configContents;
configContents = HDC2080_readReg(MEASUREMENT_CONFIG);
switch (mode)
{
case TEMP_AND_HUMID:
configContents = (configContents & 0xF9);
break;
case TEMP_ONLY:
configContents = (configContents & 0xFC);
configContents = (configContents | 0x02);
break;
case HUMID_ONLY:
configContents = (configContents & 0xFD);
configContents = (configContents | 0x04);
break;
default:
configContents = (configContents & 0xF9);
}
HDC2080_writeReg(MEASUREMENT_CONFIG, configContents);
}
void HDC2080_setRate(int rate)
{
uint8_t configContents;
configContents = HDC2080_readReg(CONFIG);
switch (rate)
{
case MANUAL:
configContents = (configContents & 0x8F);
break;
case TWO_MINS:
configContents = (configContents & 0x9F);
configContents = (configContents | 0x10);
break;
case ONE_MINS:
configContents = (configContents & 0xAF);
configContents = (configContents | 0x20);
break;
case TEN_SECONDS:
configContents = (configContents & 0xBF);
configContents = (configContents | 0x30);
break;
case FIVE_SECONDS:
configContents = (configContents & 0xCF);
configContents = (configContents | 0x40);
break;
case ONE_HZ:
configContents = (configContents & 0xDF);
configContents = (configContents | 0x50);
break;
case TWO_HZ:
configContents = (configContents & 0xEF);
configContents = (configContents | 0x60);
break;
case FIVE_HZ:
configContents = (configContents | 0x70);
break;
default:
configContents = (configContents & 0x8F);
}
HDC2080_writeReg(CONFIG, configContents);
}
void HDC2080_triggerMeasurement()
{
uint8_t configContents;
configContents = HDC2080_readReg(MEASUREMENT_CONFIG);
configContents = (configContents | 0x01);
HDC2080_writeReg(MEASUREMENT_CONFIG, configContents);
}
void HDC2080_setTempRes(int resolution)
{
uint8_t configContents;
configContents = HDC2080_readReg(MEASUREMENT_CONFIG);
switch (resolution)
{
case FOURTEEN_BIT:
configContents = (configContents & 0x3F);
break;
case ELEVEN_BIT:
configContents = (configContents & 0x7F);
configContents = (configContents | 0x40);
break;
case NINE_BIT:
configContents = (configContents & 0xBF);
configContents = (configContents | 0x80);
break;
default:
configContents = (configContents & 0x3F);
}
HDC2080_writeReg(MEASUREMENT_CONFIG, configContents);
}
void HDC2080_setHumidRes(int resolution)
{
uint8_t configContents;
configContents = HDC2080_readReg(MEASUREMENT_CONFIG);
switch (resolution)
{
case FOURTEEN_BIT:
configContents = (configContents & 0xCF);
break;
case ELEVEN_BIT:
configContents = (configContents & 0xDF);
configContents = (configContents | 0x10);
break;
case NINE_BIT:
configContents = (configContents & 0xEF);
configContents = (configContents | 0x20);
break;
default:
configContents = (configContents & 0xCF);
}
HDC2080_writeReg(MEASUREMENT_CONFIG, configContents);
}
void HDC2080_setHighTemp(float temp)
{
uint8_t temp_thresh_high;
// Verify user is not trying to set value outside bounds
if (temp < -40)
{
temp = -40;
}
else if (temp > 125)
{
temp = 125;
}
// Calculate value to load into register
temp_thresh_high = (uint8_t)(256 * (temp + 40) / 165);
HDC2080_writeReg(TEMP_THR_H, temp_thresh_high);
}
void HDC2080_setLowTemp(float temp)
{
uint8_t temp_thresh_low;
// Verify user is not trying to set value outside bounds
if (temp < -40)
{
temp = -40;
}
else if (temp > 125)
{
temp = 125;
}
// Calculate value to load into register
temp_thresh_low = (uint8_t)(256 * (temp + 40) / 165);
HDC2080_writeReg(TEMP_THR_L, temp_thresh_low);
}
void HDC2080_setHighHumidity(float hum)
{
uint8_t humid_thresh;
// Verify user is not trying to set value outside bounds
if (hum < 0)
{
hum = 0;
}
else if (hum > 100)
{
hum = 100;
}
// Calculate value to load into register
humid_thresh = (uint8_t)(256 * (hum) / 100);
HDC2080_writeReg(HUMID_THR_H, humid_thresh);
}
void HDC2080_setLowHumidity(float hum)
{
uint8_t humid_thresh;
// Verify user is not trying to set value outside bounds
if (hum < 0)
{
hum = 0;
}
else if (hum > 100)
{
hum = 100;
}
// Calculate value to load into register
humid_thresh = (uint8_t)(256 * (hum) / 100);
HDC2080_writeReg(HUMID_THR_L, humid_thresh);
}
int16_t HDC2080_readTemp()
{
uint8_t byte[2];
uint16_t temp;
byte[0] = HDC2080_readReg(TEMP_LOW);
byte[1] = HDC2080_readReg(TEMP_HIGH);
temp = (unsigned int)byte[1] << 8 | byte[0];
return (int16_t)(temp)*165 / 65536 - 40;
}
int16_t HDC2080_readHumidity()
{
uint8_t byte[2];
uint16_t humidity;
byte[0] = HDC2080_readReg(HUMID_LOW);
byte[1] = HDC2080_readReg(HUMID_HIGH);
humidity = (unsigned int)byte[1] << 8 | byte[0];
return (int16_t)(humidity) / (65536) * 100;
}
uint8_t HDC2080_readReg(uint8_t reg)
{
uint8_t data = 0;
HDC2080_openReg(reg);
I2C1->CR1 = 0x00000001;
I2C1->CR2 = 0x02012482;
while (I2C1->ISR & I2C_ISR_RXNE == RESET);
data = I2C1->RXDR;
while (I2C1->ISR & I2C_ISR_STOPF == RESET);
I2C1->CR1 = 0x00000000;
return data ;
}
void HDC2080_openReg(uint8_t reg)
{
I2C1->CR1 = 0x00000001;
I2C1->CR2 = 0x00012082;
while (I2C1->ISR & I2C_ISR_BUSY == RESET);
I2C1->TXDR = reg;
while (I2C1->ISR & I2C_ISR_TC == RESET);
I2C1->CR1 = 0x00000000;
}
void HDC2080_writeReg(uint8_t reg, uint8_t data)
{
I2C1->CR1 = 0x00000001;
I2C1->CR2 = 0x00012082;
while (I2C1->ISR & I2C_ISR_BUSY == RESET);
I2C1->TXDR = reg;
while (I2C1->ISR & I2C_ISR_TC == RESET);
I2C1->TXDR = data;
while (I2C1->ISR & I2C_ISR_TC == RESET);
I2C1->CR1 = 0x00000000;
}
void DelayinMs()
{
if (delayCounter > 0)
{
delayCounter--;
}
else if (delayCounter == 0)
{
delayFlag = 1;
}
}
////////////////////////////////////////////////