Part Number: LDC1000
Hello,
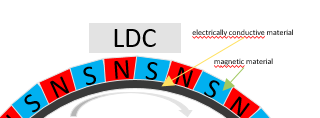
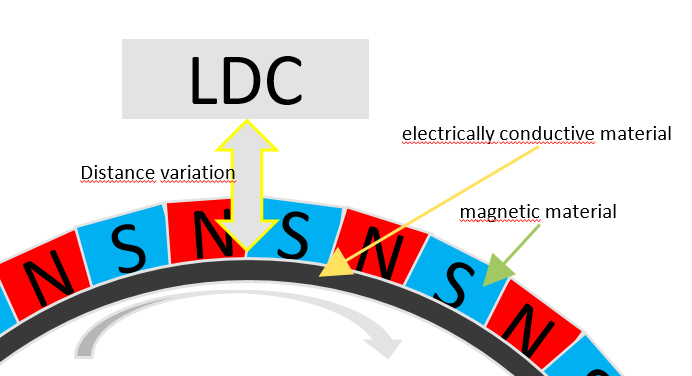
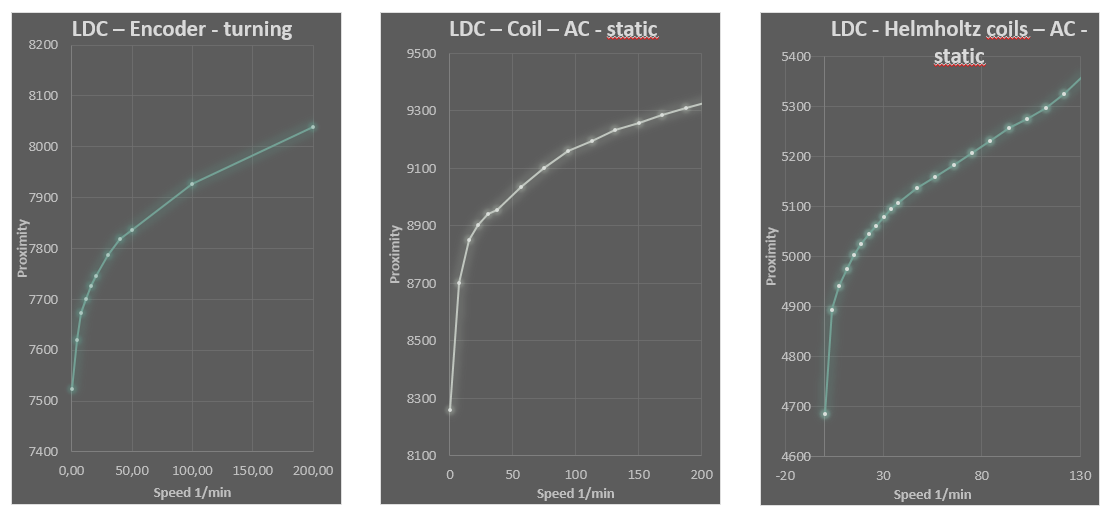
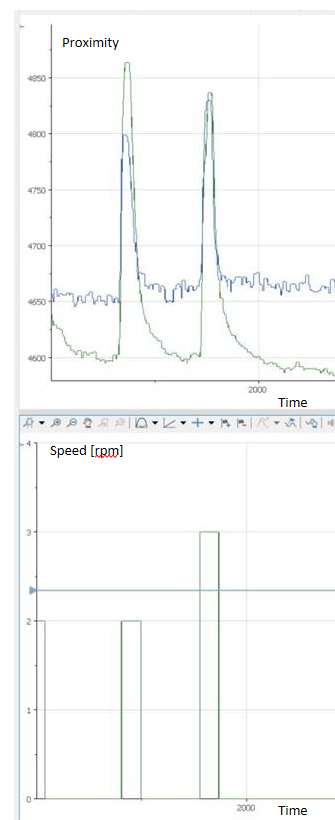
we see following effect when our magnetic Encoder ring starts turning. Can you explain this behaviour?
I expect same behaviour will occur when switching to the successor chip LDC1001?
Thanks in advance.
Regards
Frank
Original question:

Part Number: LDC1000
Hello,
we see following effect when our magnetic Encoder ring starts turning. Can you explain this behaviour?
I expect same behaviour will occur when switching to the successor chip LDC1001?
Thanks in advance.
Regards
Frank