


My LDC1614 implementation uses three coils to sense a single target. Since we have multiple coils, we can compare them to remove ambient interference. I'm wondering if there is a best practice approach for this, as I can see drawbacks in the methods that we're currently using. I'm attaching pictures pre and post-filtering.
Graph 1:
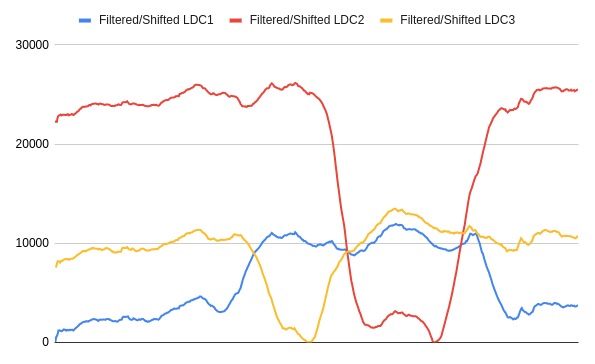
Graph 2:

Here are my questions:
1. Is this an expected amount of interference? I've done extensive prototyping on the EVM and I never saw as much as I'm seeing in graph 1. The EVM essentially looked exactly like graph 2 without special settings or math. That makes me think there's some functionality on the LDC side that I'm unfamiliar with, that is already filtering some or all of this interference.
2. If there is no internal interference subtraction with reference coils, is there a best practice approach to this? If we use LDC1 as a baseline and do a diff, we're essentially operating such that the system is at most as reliable as LDC1. If we do the following:
LDC1filtered = LDC1raw - LDC2raw
LDC2filtered = LDC2raw - LDC3raw
LDC3filtered = LDC3raw - LDC1raw
Each sensor is only taking advantage of one reference sensor at any time. In both calculations, as the target approaches any one coil, that signal will be subtracted from the other coils as well. That's the source of the big difference in the shape of each of these curves between graphs.
