Hi,
I am using IWR6843ISK device for collecting 3D point cloud data. I have already gone through the experiments given in TI for Fall detection "http://dev.ti.com/tirex/explore/node?node=AFmsC4Pjv3N8OtdrcDLsEg__VLyFKFf__LATEST&search=mmWave%20industrial%20toolbox"
Using that experiment, I am trying to implement Fall detection.
Steps done sofar:
1. Using OOB_PARSER, I am getting different stances of point cloud data for each frame.
2. As suggested by the TI forum (https://e2e.ti.com/support/tools/ccs/f/81/p/892867/3301211#3301211) , I have mapped the tracked index with the point cloud data
3. Now I arrived a 5D array, which will be having mapped target point alone in a 5D format
- Col 0 - X
- Col 1 - Y
- Col 2 - Z
- Col 3 - Acceleration
- Col 4 - SNR
This array will be of No of Tracked point size.
4. I have dumped those data 's in a JSON format and attached here for your reference. (Captured for Standing , Sitting & Lying mode)
Algorithm for Height detection:
- Sort the 5D array with respect to Y axis . I assume Y is for height. Please correct if I am wrong.
- Calculate the distance between first and last point of the 5D point cloud data per frame
- This distance is nothing but height of the object per frame
Attached here the height series data captured for different frames
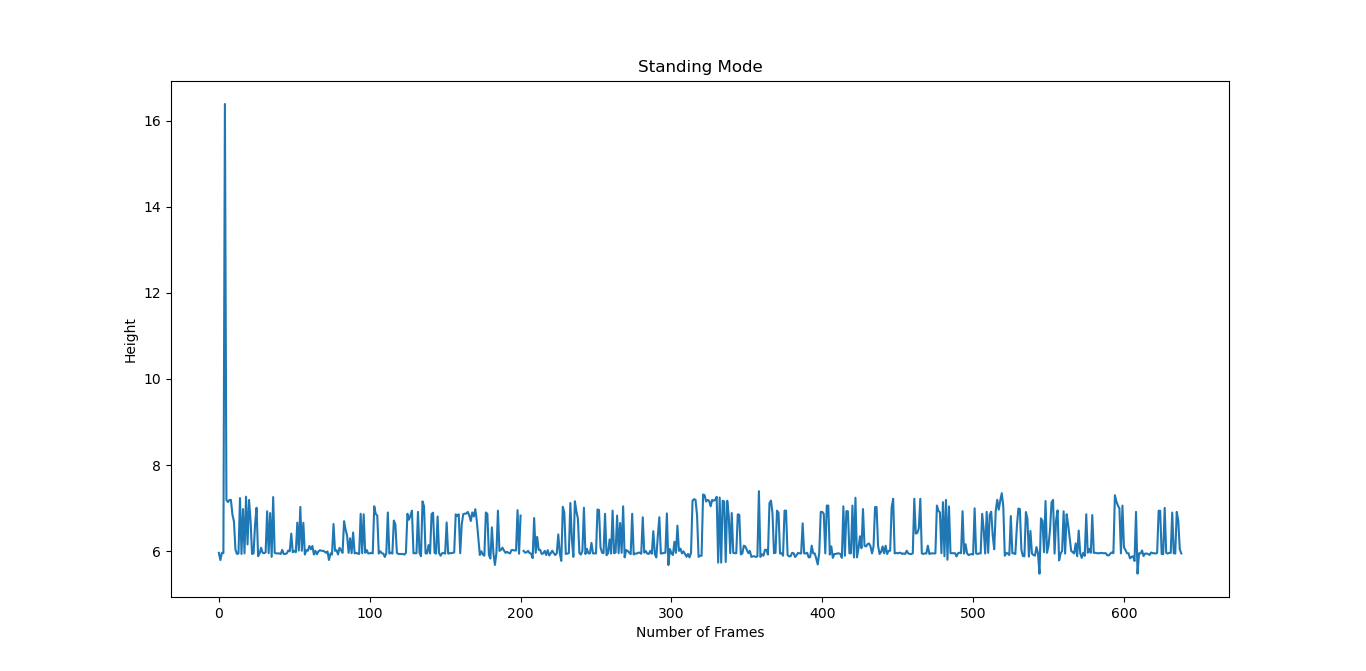

Here I am still seeing that height of each frames are getting fluctuated. I wanted it to be normalized.
Queries to be clarified
1. Which Average height detection model is used in Fall detection experiment. Please elaborate.
2. Even person sitting idle / standing idle, Why i am seeing the fluctuation in height data. Is my height detection formula is correct ? ( Distance = 3D points distance bw highest and lowest point of a frame)
Please help me out on this
Regards,
Vivek