Other Parts Discussed in Thread: IWR1642
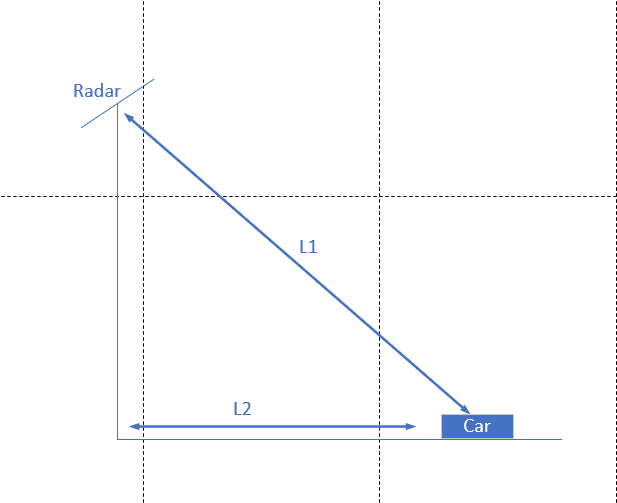
Hello, since IWR1642 is a 2D radar, it cannot detect the z-axis height of the vehicle, so I have a question. When it detects the vehicle at 7M, does the radar output the distance of L1 or L2?As shown in the figure below.If the radar output is the length of L1, I would like to ask whether the vehicle monitoring code written in Matlab code has processed the length of L1 output from the radar to make it the length of L2.