


Hi,
I'm making a Fall Detection program but i have trouble with the Math.
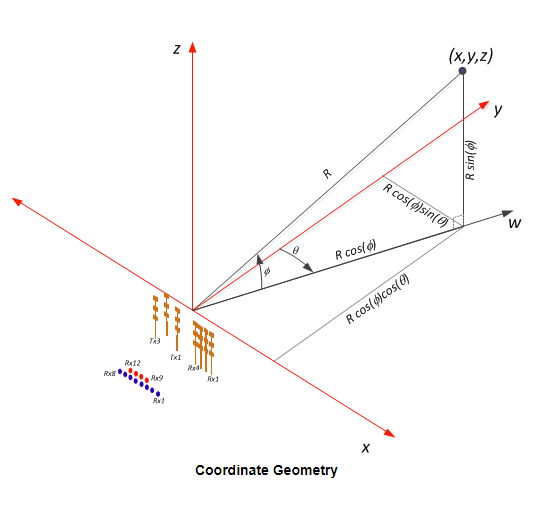
I know that the sensor looks straigth ahead and every detected object is seen with:
-The range between sensor and object, the elevation angle and the azimuth angle.
And there are standard math formulas to calculate the X,Y and Z values:
But my sensor is turned 45 degree downwards changing the whole plane:
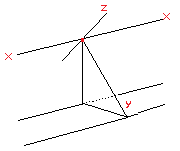
How much do i need to compensate for this in the Math?
Can i even use the Old Math formulas?
Regards,
Max
