Other Parts Discussed in Thread: MMWAVEICBOOST
Hello all,
I recently purchased the new IWR6843AOPEVM ES2.0 AOP device and the MMWAVEICBOOST development board for testing. Previously, I tested successfully the IWR6843AOPEVM rev c radar module successfully, using the related SDK v3.2. For this one, I installed the SDK v3.4 and I use the ROS driver from the new Industrial Toolbox 4.3.1. I tested the sensor using both the XDS110 USB port from MMWAVEICBOOST board directly from the IWR6843AOPEVM module's USB data port. In both situations, the sensor was working perfectly when I was testing it with the online mmwave demo visualizer (https://dev.ti.com/gallery/view/mmwave/mmWave_Demo_Visualizer/ver/3.4.0/) (both in Windows and Linux Ubuntu). However, when I was using the ROS driver provided by Industrial Toolbox 4.3.1, I was receiving the following message:
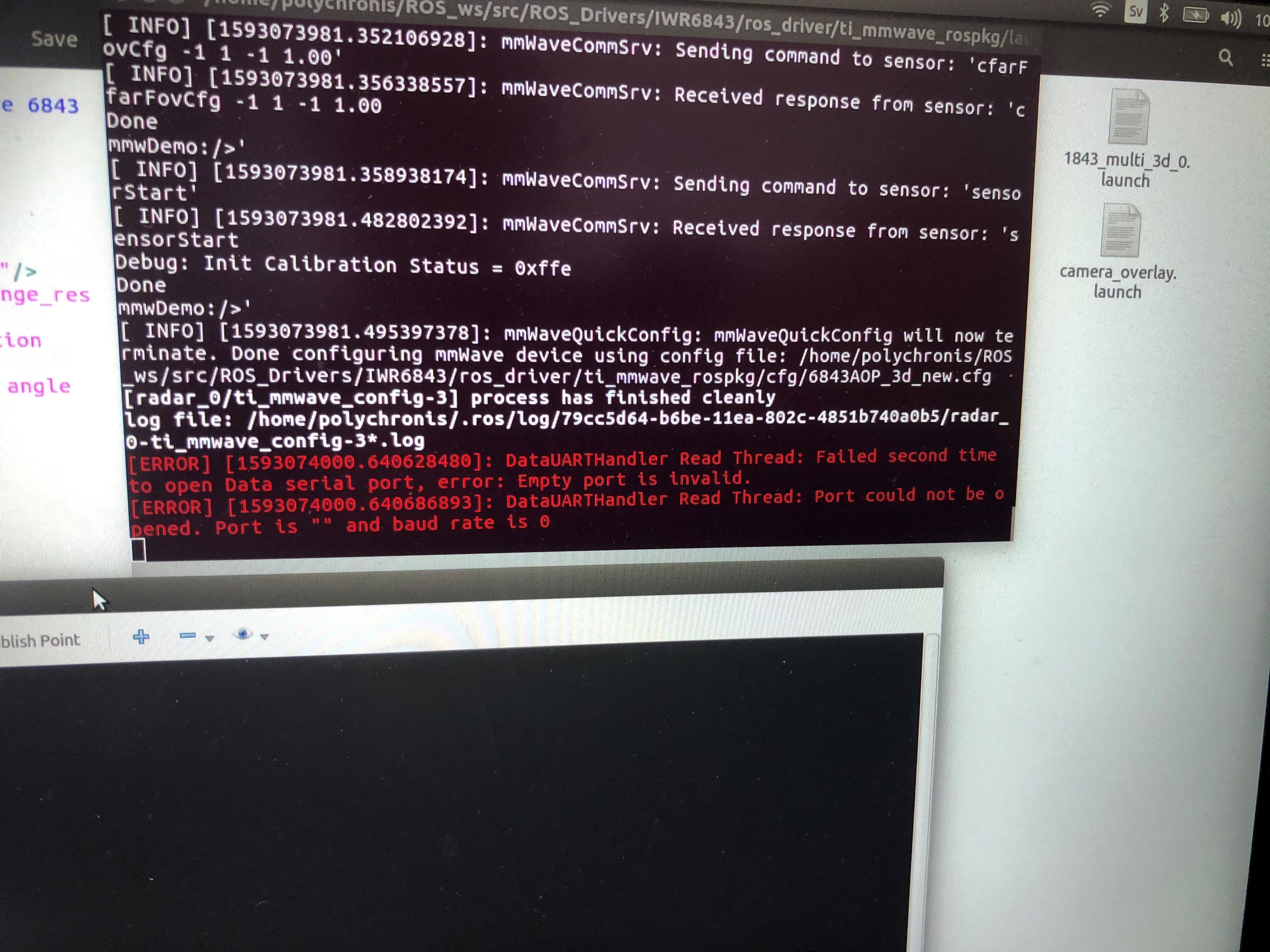
[ERROR] [1592905126.248976826]: DataUARTHandler Read Thread: Failed second time to open Data serial port, error: Empty port is invalid.
[ERROR] [1592905126.249071285]: DataUARTHandler Read Thread: Port could not be opened. Port is "" and baud rate is 0
It seams that the sensor connects ok, but there is no data transmission for some reason and after a while I am receiving the above message! To start the ROS driver I am using the following launch file:
roslaunch ti_mmwave_rospkg 6843AOP_multi_3d_0.launch
Paying extra careful for the correct USB port names and baud rates. It is worth mentioning here that the previous version of the ROS driver with rev c IWR6843AOPEVM hardware, worked just fine! Any ideas what might be the problem here?
Thank you in advance,
Akis