Hi,
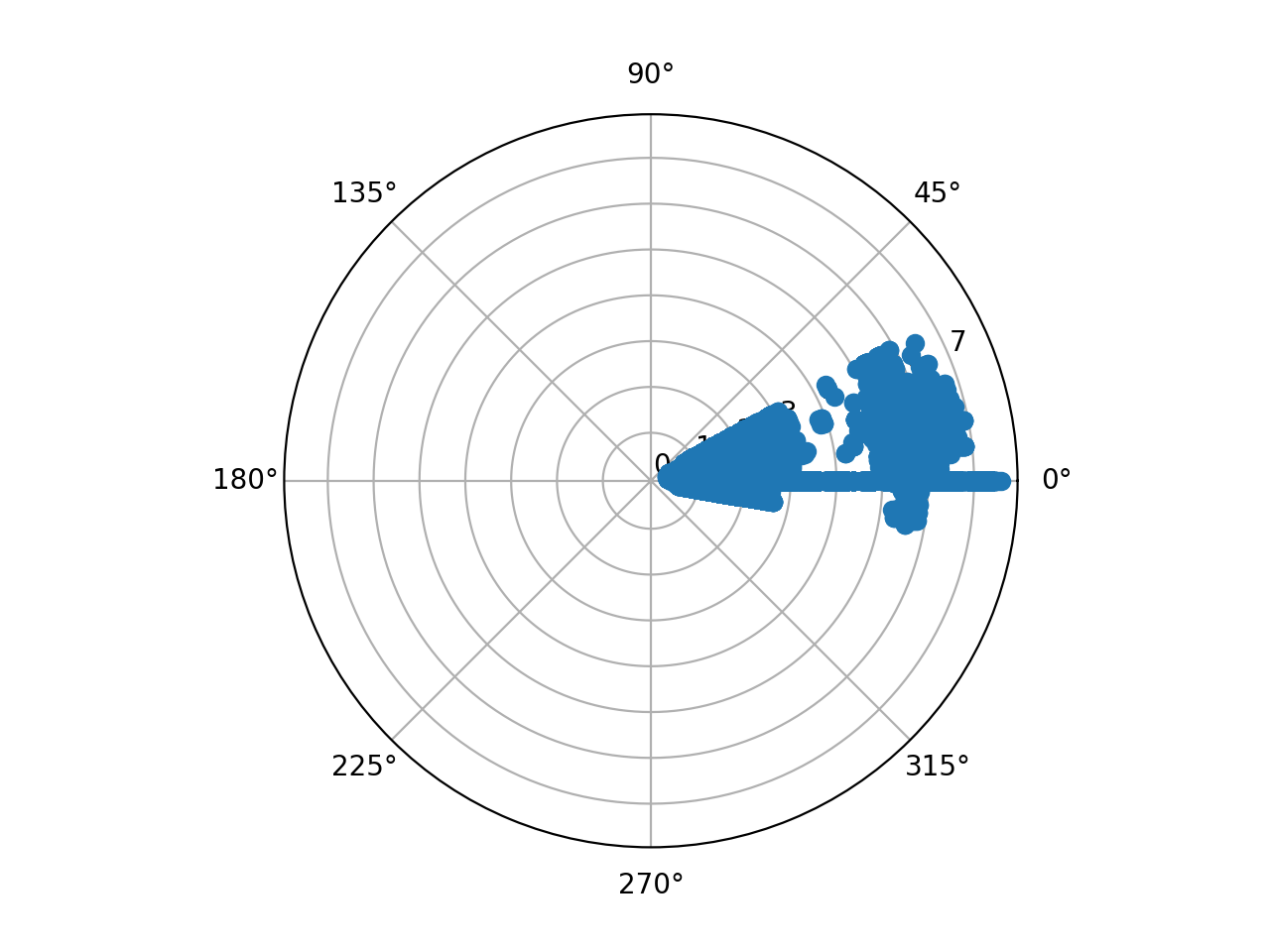
The demo I'm running is 3D_people_counting.It seems that the elevation angle range is -9.74 degs to 28.64 degs,0 is not the center,which means the 0 degs in elevation is not perpendicular to the radar board.
Is there any explanation about this?
Thank you.