Other Parts Discussed in Thread: IWR6843, IWR6843ISK, MMWAVEICBOOST,
1.
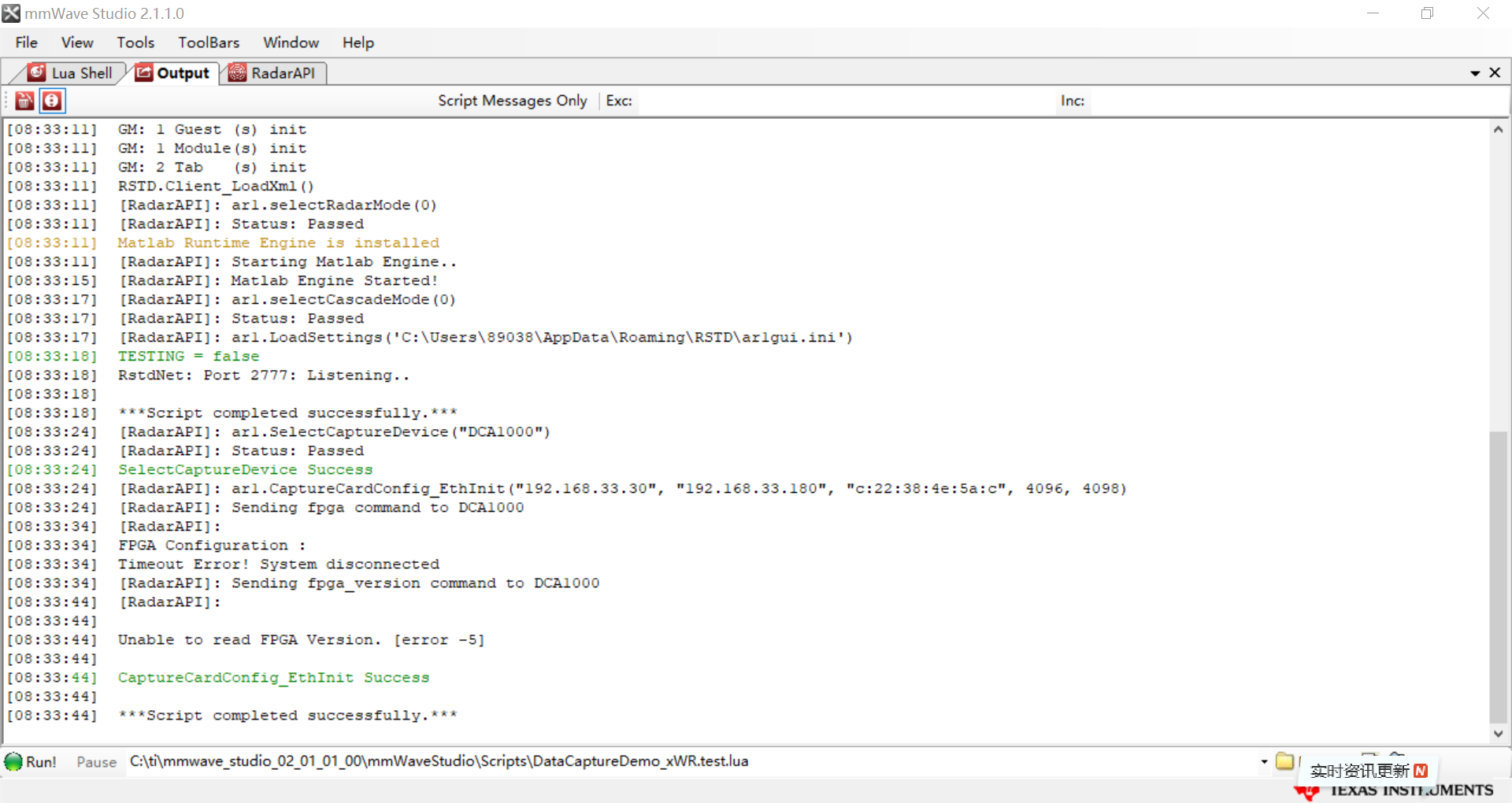
DCA1000 configure IP fail , what is the reason
1.1 as below:
[08:02:53] [RadarAPI]: ar1.SelectCaptureDevice("DCA1000")
[08:02:53] [RadarAPI]: Status: Passed
[08:02:53] SelectCaptureDevice Success
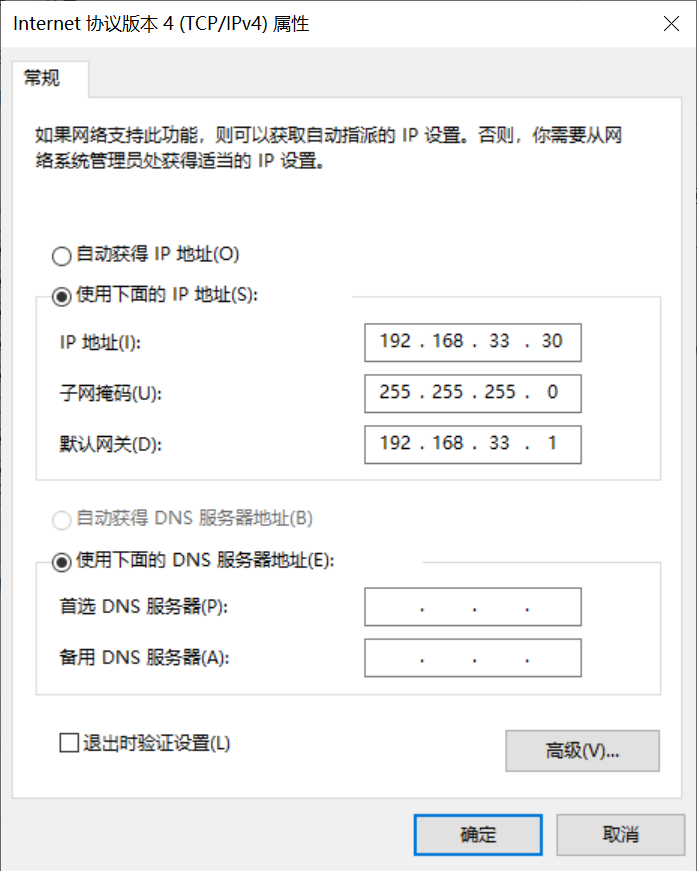
[08:02:53] [RadarAPI]: ar1.CaptureCardConfig_EthInit("192.168.33.30", "192.168.33.180", "c:22:38:4e:5a:c", 4096, 4098)
[08:02:53] [RadarAPI]: Sending fpga command to DCA1000
[08:03:03] [RadarAPI]:
[08:03:03] FPGA Configuration :
[08:03:03] Timeout Error! System disconnected
[08:03:03] [RadarAPI]: Sending fpga_version command to DCA1000
[08:03:13] [RadarAPI]:
[08:03:13]
[08:03:13] Unable to read FPGA Version. [error -5]
[08:03:13]
2.
2.1
There is a IWR6843 board(customer board) and DCA1000 board, I connect them with LVDS
2.2
IWR6843 board is burn software correct
It support output ADC info by LVDS, and need to test
2.3
IWR6843 support with 5V/3A power
DCA1000 is powerd by IWR6843 board
2.
DCA1000
FPGA_DONE_LED is green
5V_LED is green( it is indeed green, cant now show obvious in snapshot picture)
2.5
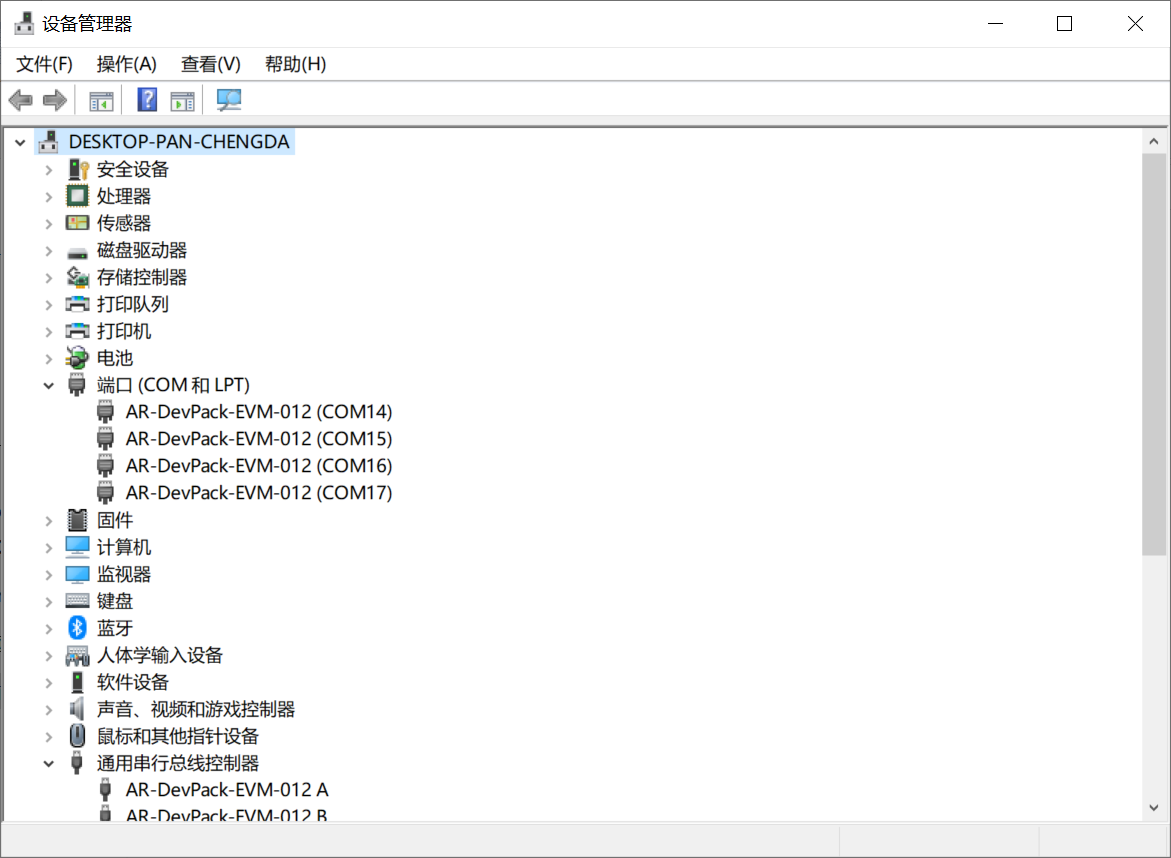
A USB line and A network line is connect between PC and DCA1000
3.
I do as below
3.1 Power ON
3.2 Run mmWave Studio 2.1.1.0
3.3 Run DataCaptureDemo_xWR.test.lua
3.4 watch output
4.
snapshot
4.1
4.2
4.3
6.
DataCaptureDemo_xWR.test.lua
--BSS and MSS firmware download
info = debug.getinfo(1,'S');
file_path = (info.source);
file_path = string.gsub(file_path, "@","");
file_path = string.gsub(file_path, "DataCaptureDemo_xWR.test.lua","");
fw_path = file_path.."..\\..\\rf_eval_firmware"
--Export bit operation file
bitopfile = file_path.."\\".."bitoperations.lua"
dofile(bitopfile)
partId = 6843
--ADC_Data file path
data_path = file_path.."..\\PostProc"
adc_data_path = data_path.."\\adc_data.bin"
-- select Device type
if (ar1.SelectCaptureDevice("DCA1000") == 0) then
WriteToLog("SelectCaptureDevice Success\n", "green")
else
WriteToLog("SelectCaptureDevice failure\n", "red")
end
--DATA CAPTURE CARD API
if (ar1.CaptureCardConfig_EthInit("192.168.33.30", "192.168.33.180", "12:34:56:78:90:12", 4096, 4098) == 0) then
WriteToLog("CaptureCardConfig_EthInit Success\n", "green")
else
WriteToLog("CaptureCardConfig_EthInit failure\n", "red")
end
--[[
WriteToLog("CaptureCardConfig_Mode Success001a\n", "green")
--AWR12xx or xWR14xx-1, xWR16xx or xWR18xx or xWR68xx- 2 (second parameter indicates the device type)
if ((partId == 1642) or (partId == 1843) or (partId == 6843)) then
if (ar1.CaptureCardConfig_Mode(1, 2, 1, 2, 3, 30) == 0) then
WriteToLog("CaptureCardConfig_Mode Success001b\n", "green")
else
WriteToLog("CaptureCardConfig_Mode failure\n", "red")
end
elseif ((partId == 1243) or (partId == 1443)) then
if (ar1.CaptureCardConfig_Mode(1, 1, 1, 2, 3, 30) == 0) then
WriteToLog("CaptureCardConfig_Mode Success\n", "green")
else
WriteToLog("CaptureCardConfig_Mode failure\n", "red")
end
end
if (ar1.CaptureCardConfig_PacketDelay(25) == 0) then
WriteToLog("CaptureCardConfig_PacketDelay Success\n", "green")
else
WriteToLog("CaptureCardConfig_PacketDelay failure\n", "red")
end
--Start Record ADC data
ar1.CaptureCardConfig_StartRecord(adc_data_path, 1)
RSTD.Sleep(1000)
--Trigger frame
ar1.StartFrame()
RSTD.Sleep(5000)
--Post process the Capture RAW ADC data
ar1.StartMatlabPostProc(adc_data_path)
WriteToLog("Please wait for a few seconds for matlab post processing .....!!!! \n", "green")
RSTD.Sleep(10000)
--]]