


Dear sir or madam,
we did some experiments with our TIDEP-01012 (Rev. C) and we are confused regarding the angular resolution. The Sensor Reference Design (Link) indicates in table 1 (Key System Specifications) on page 4 that the MIMO-Settings have an Azimuth Angle Resolution of 1.4 degrees. However, when plotting a map of a MIMO-acquisition, we seem to have a much higher angular resolution within the previously specified range of about +/-60° (Link) or +/-70° as mentioned in the Sensor Reference Design. However, 1.4° is roughly achieved at about +/-70°. Did you therefore specify the angular resolution based on this threshold and the angular resolution is indeed much better between +/-40°?
Thank you very much for your help and best regards,
Andreas

Fig. 1: Angles received from asin(sine_theta) * 180/pi in plot_range.azimuth_2D.m

Fig. 2: Computed angular differences with a range of 0.4476° to 7.1666°.
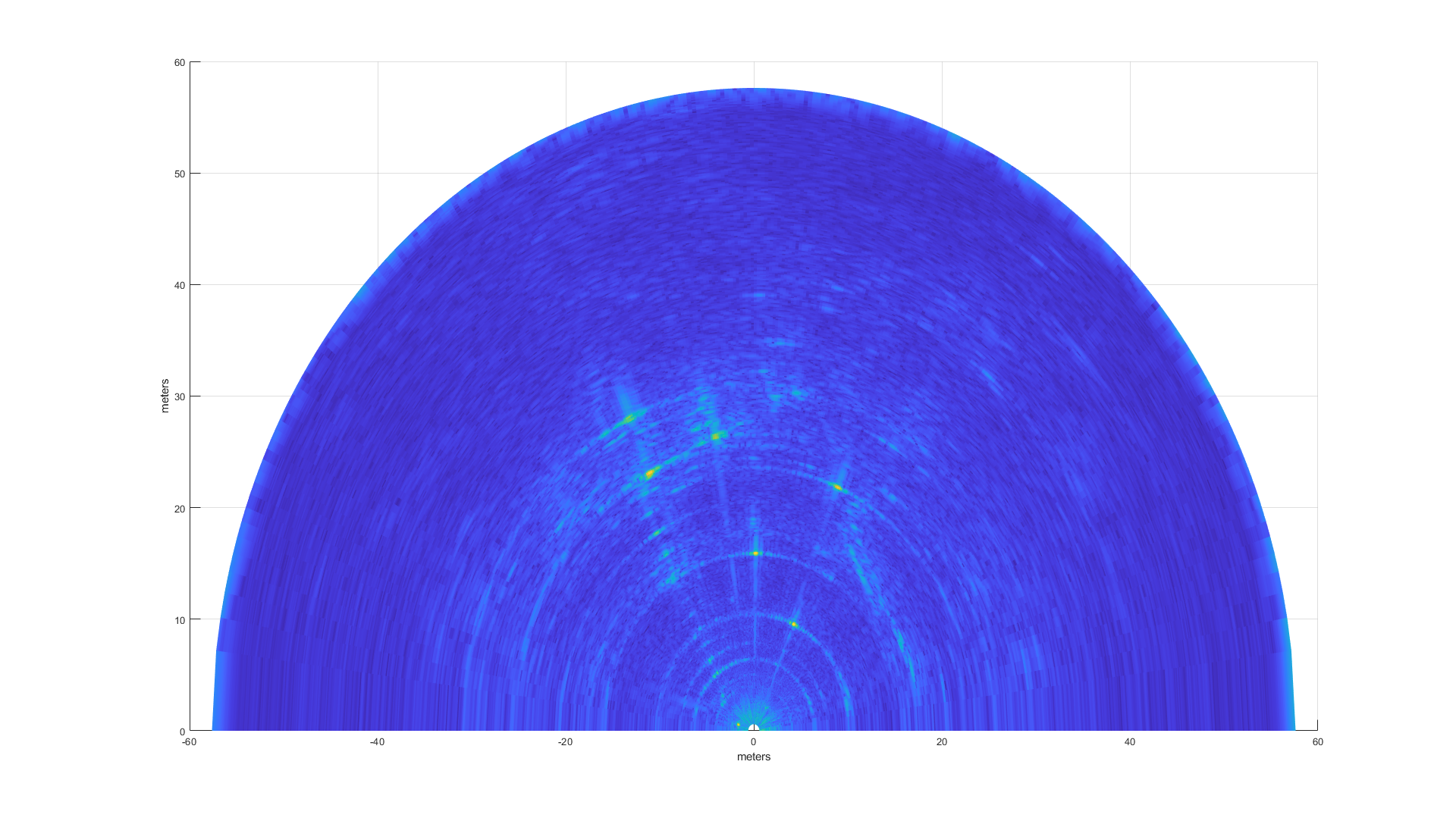
Fig. 3: Example acquisition.

