


Other Parts Discussed in Thread: IWR6843, , IWR6843ISK, AWR1443, AWR6843, IWR1443
I'm trying to use the IWR6843AOP in an application where I'd like to detect a 500mm (w) x 250mm (h) obstacle at a distance of up to 20m when moving at 40kph. The radar will be mounted to a vehicle moving up to 40kph; the objects being detected are stationary.
I'm using the mmWave Sensing Estimator, v1.4, to generate a config file and I had a couple questions. First of all, it seems there's no input parameter for the antenna being used, which I'm a little confused about. I've seen other posts on this forum where people were directed to use the sensing estimator tool with the AOP unit, but in the drop-down for selecting the senor only the IWR6843 (not AOP) is available, so I'm assuming it's ok to use that one? But then how are the different antenna characteristics taken into account between the AOP and IWR6843 EVM (which comes in both narrow and wide FOV options)?
Here's the parameters I was thinking of using to get started:
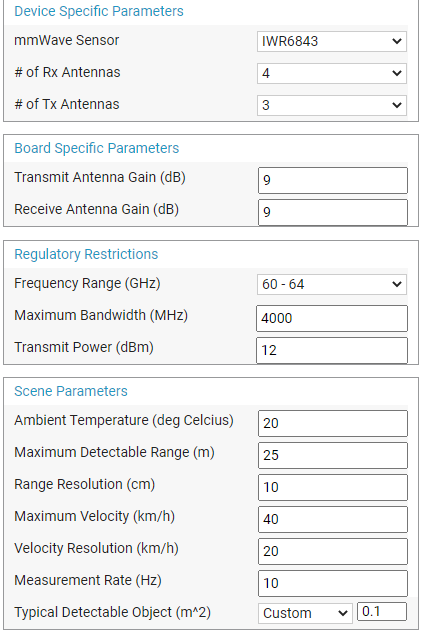
* Is there any rule of thumb for setting range resolution compared to minimum detectable object size? For example in my case I figured a value of 10cm, which is a little less than half of the minimum dimension I'm trying to detect of 25cm, seemed reasonable. But I'm not sure if having higher resolution and thus more 'samples' where the object is detected is desirable? Or is there also a tradeoff to consider where setting the resolution too low will result in more spurious noise in the point cloud?
* What impact does the 'Typical Detectable Object' parameter have? It doesn't seem to actually change any of the chirp parameters. Is it just for reference?
* How should I be thinking about velocity resolution in my application, where the radar is moving but the objects I'm trying to detect are stationary? Is it irrelevant since there's no difference in velocity between the objects I'm trying to detect?
thanks in advance,
Ryan



