Hi,
As see as in the Industrial Toolbox 4.4.1, there are people_couting and overhead_people_couting labs both of which need the sensor position and scene boundary configuration. Would you please help me check whether my following understanding is correct?
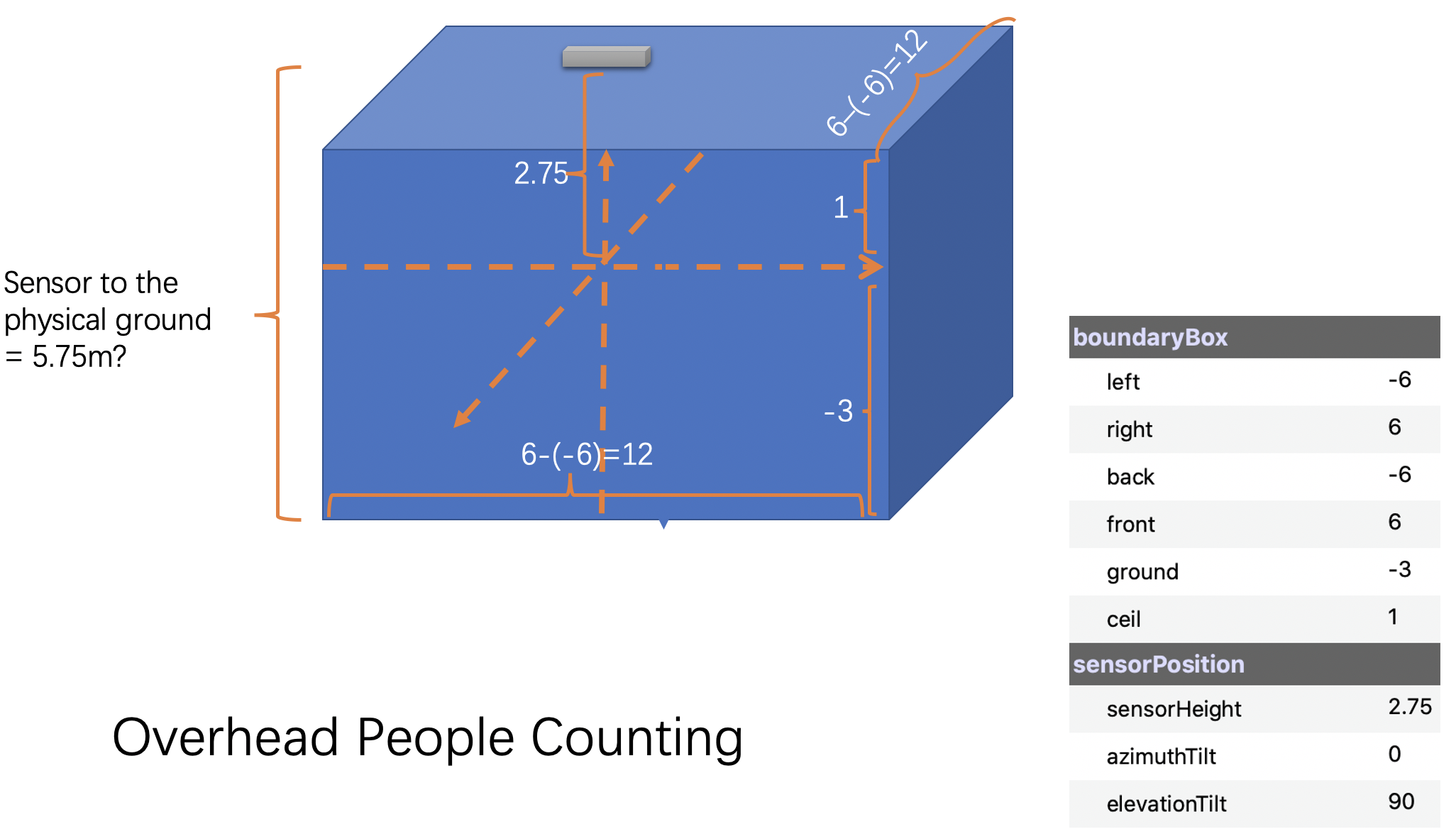
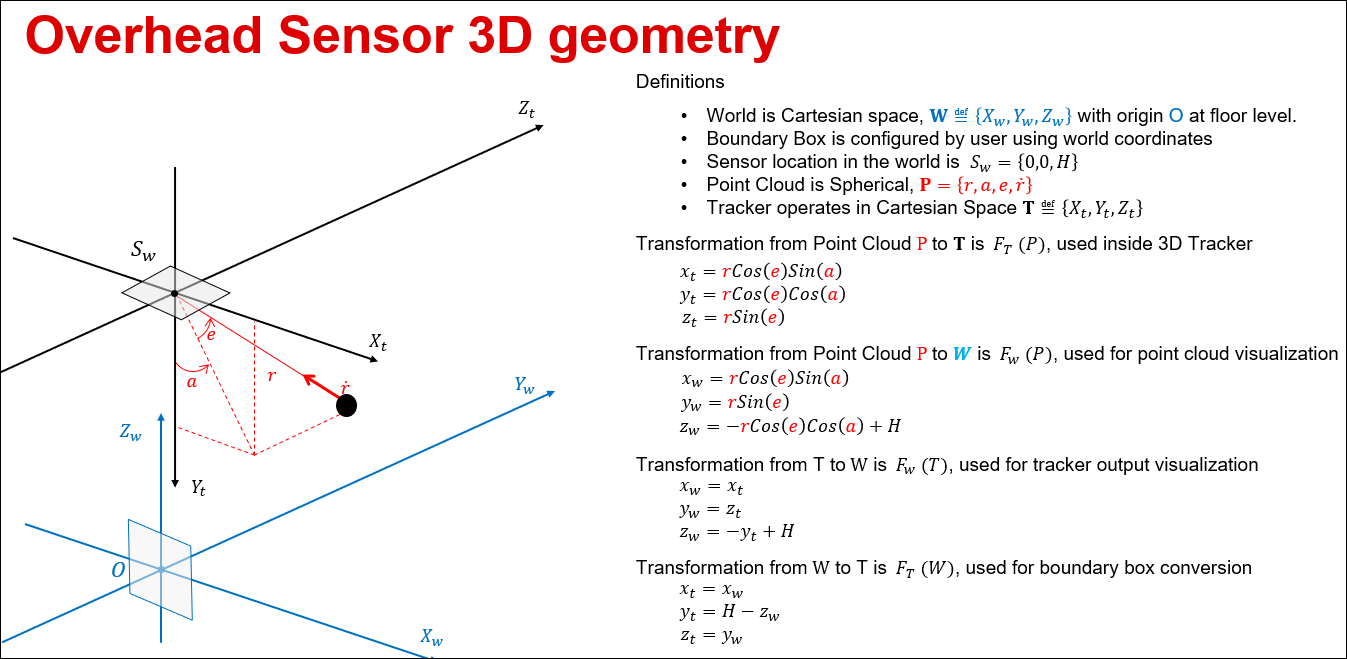
1. Origins used in gtrack are x=0, y=0 and z=-sensorHeight for both projects and the sensorHeight is actually the distance from the sensor to the origin. Is that correct?
2. The distance from the sensor mounting position to the physical ground is 2.75-(-3)=5.75 for both projects. Is that correct?
3. The translation from the boundary box's coordinate system to the sensor-centric coordinate system completely ignores the azimuthTilt of the sensor. Is it designed on purpose or just a simplified implementation?
Thanks,
Tom