Hello,
We use the SPIA interface to flash the IWR chip, however we have some problem with the stability (flashing doesnt work 100% of the time). I've done some timing measurement to see if there is a problem with the timing. We use the IWR6843 as Slave and and our CPU as master. The SPI interface is set up with Clock Polarity=0 and Clock Phase =0.

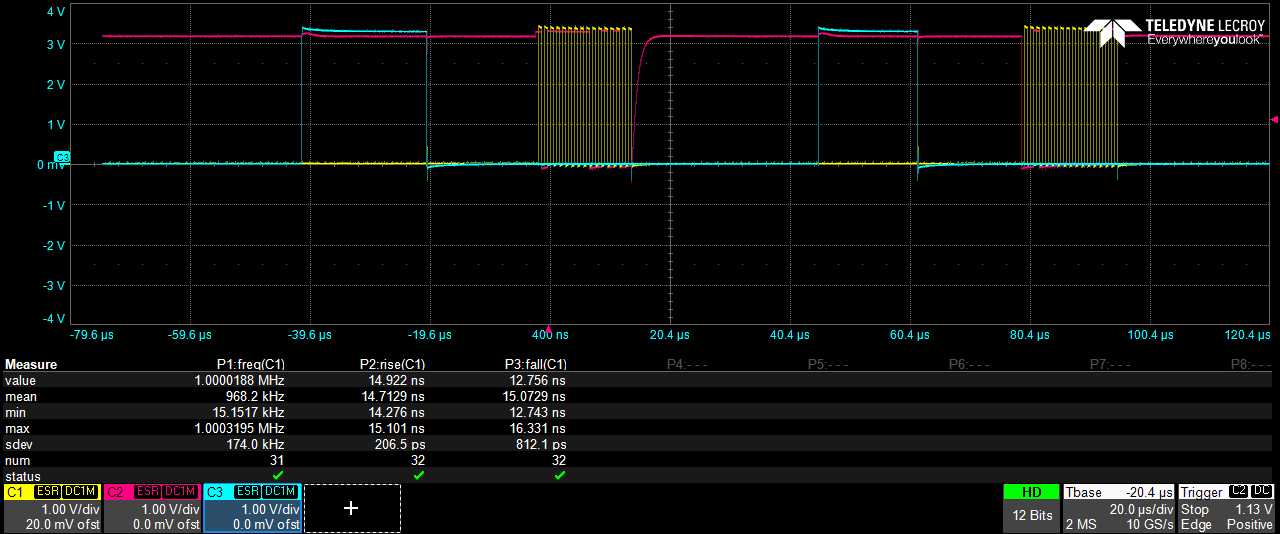
Our CKL frequency is 1MHz (1us period time)
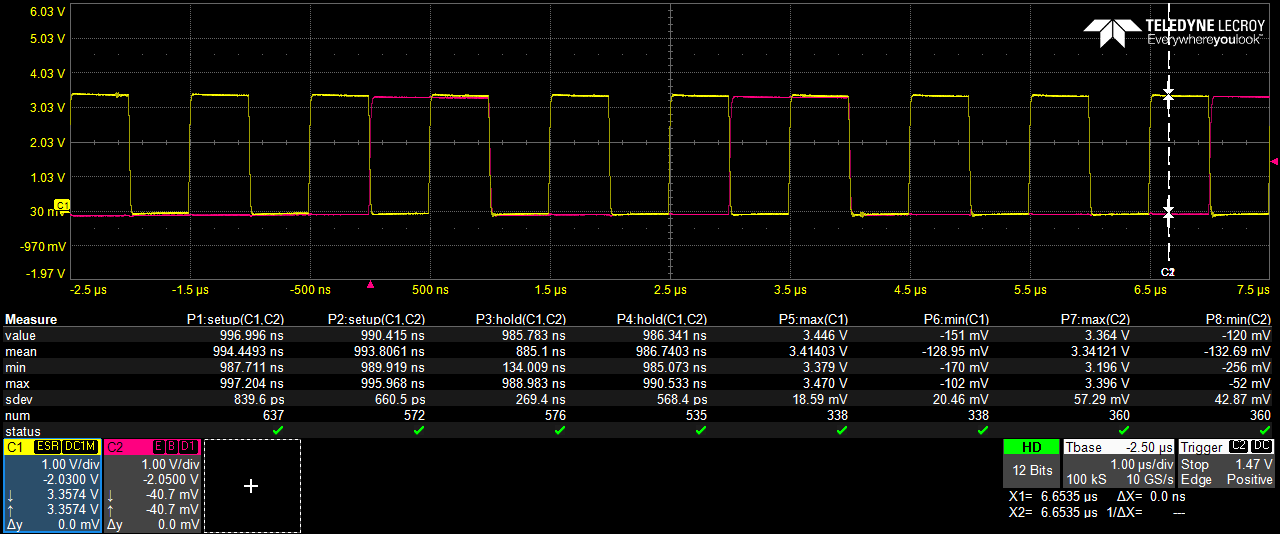
For SIMO I measure setup time to 997ns (6 in figure)
SIMO hold time is 998ns (7 in figure)
Both within spec.
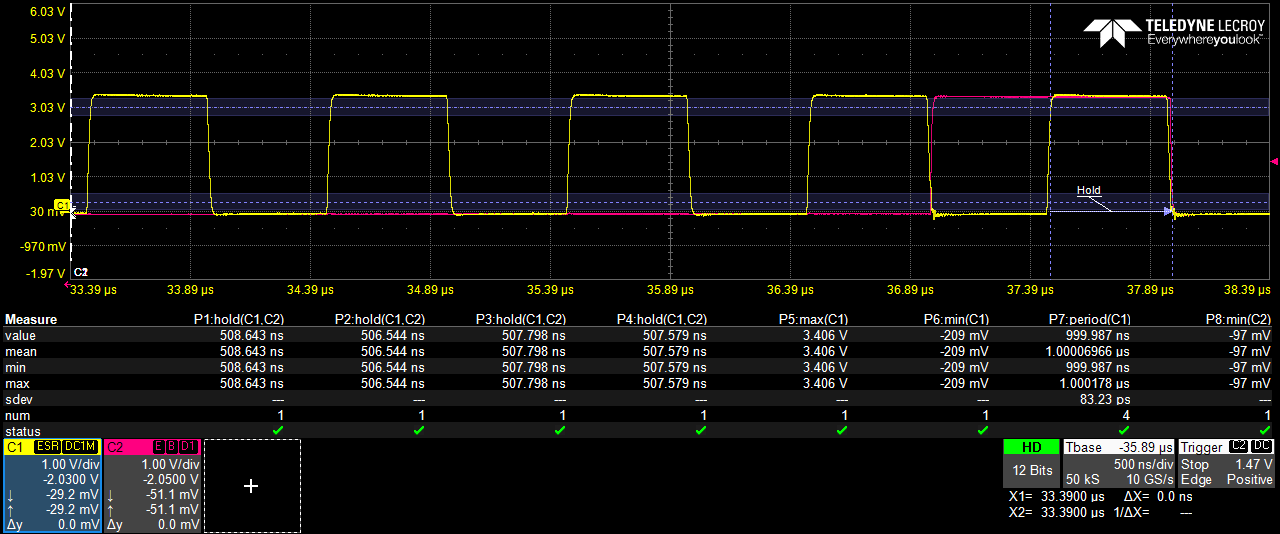
For SOMI
I measure hold time to 506ns (5 in figure) within spec. Should be > 2ns
But the delay time is measured to 506ns (4 in figure) (clk rising to data faling/risning) this is out of your specification. According to you specification it should be <10ns. Se measurement plot below.
Do i misinterpret the specification or is the timing setup wrong?
SOMI timing measurement
SIMO timing measurement
Best regards
Eagle Wang