Hello,
Do you have the way to improve the range accuracy?
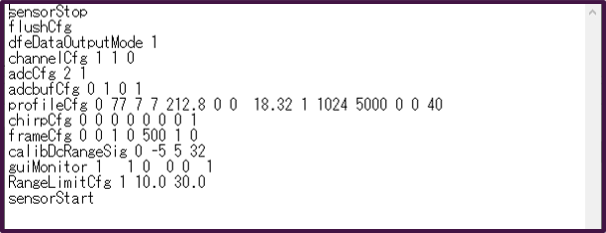
In case of setting to detect 0m - 20m in cfg file, we could find about 5mm error in range of 0m - 8m.
For example, by setting to detect 5m - 10m, can we improve the range accuracy?
Best Regards,
Nomo