Other Parts Discussed in Thread: IWR6843
Hello,
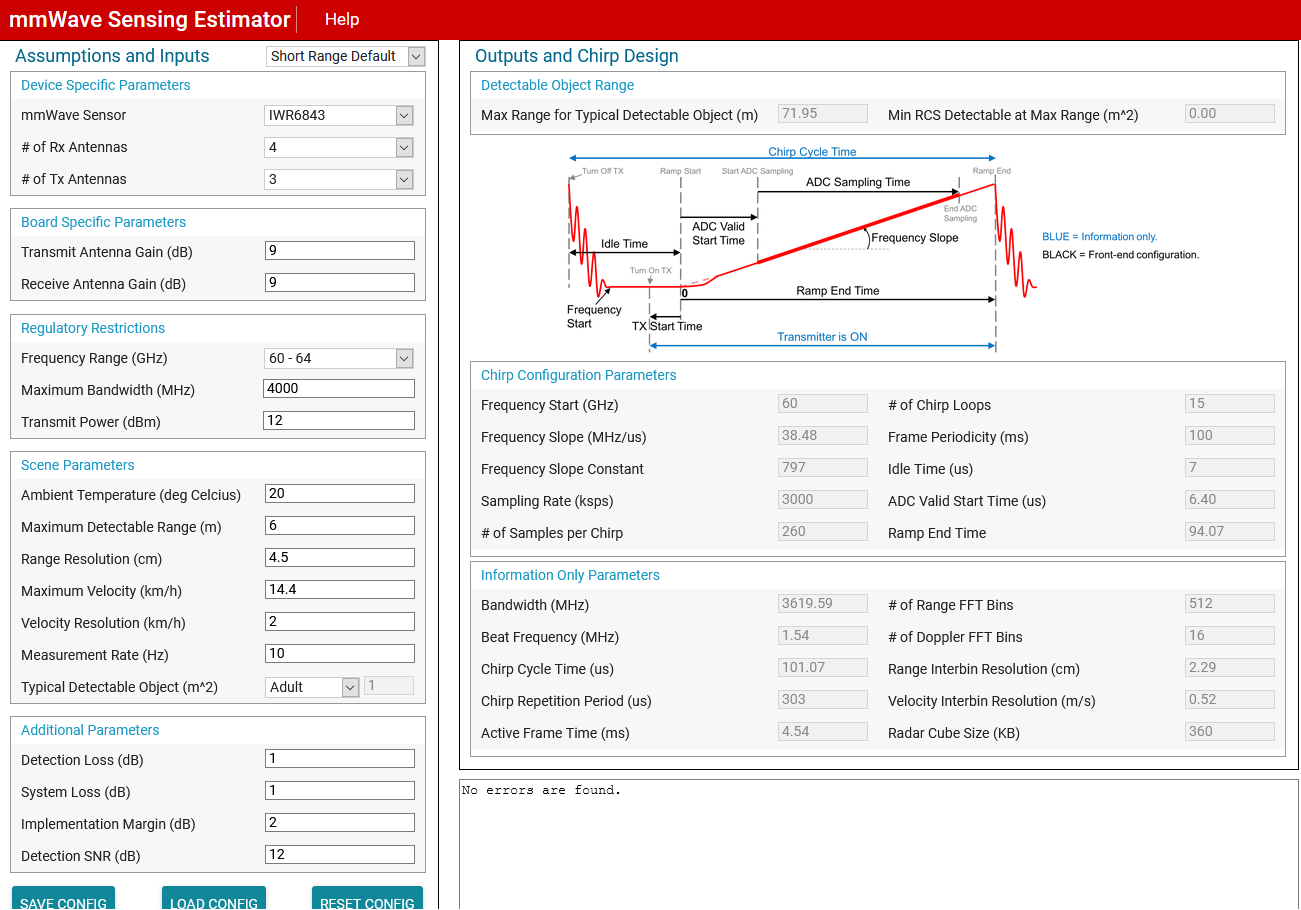
I'm testing the IWR6843AOPEVM performance using the lab called "68xx_3D_people_counting" and the "visualizer" tool ( mmWave_People_Counting_GUI.exe) provided by the "mmwave_industrial_toolbox_4_5_1__win" package.
Following is my custom configuration file loads in the visualizer:
*********************************
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
lowPower 0 0
profileCfg 0 60 80 7 27 0 0 120 1 250 12500 0 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
chirpCfg 2 2 0 0 0 0 0 4
frameCfg 0 2 128 0 41.388 1 0
dynamicRACfarCfg -1 4 4 2 4 8 16 4 4 4.00 4.50 0.50 1 1
staticRACfarCfg -1 4 4 2 4 8 16 4 6 12.00 13.00 0.30 0 0
dynamicRangeAngleCfg -1 0.75 0.0010 1 0
dynamic2DAngleCfg -1 1.5 0.0300 1 0 1 0.50 0.85 8.00
staticRangeAngleCfg -1 1 8 4
antGeometry0 -1 -1 0 0 -3 -3 -2 -2 -1 -1 0 0
antGeometry1 -1 0 -1 0 -3 -2 -3 -2 -3 -2 -3 -2
antPhaseRot 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1
fovCfg -1 70.0 20.0
compRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
staticBoundaryBox -1 2 2 5 -1.1 2
boundaryBox -1.5 2.5 0.3 6 -1.1 2.5
sensorPosition 1.1 0 0
gatingParam 3 2 2 2 0
stateParam 3 3 10 40 5
allocationParam 0 800 0.1 15 0.1 20
trackingCfg 1 2 1000 20 67 105 41.388
sensorStart
************************************
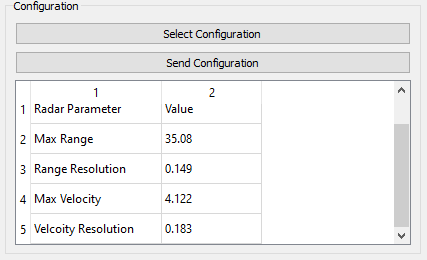
The visualizer calcs a Max Range equal to 14.06 m.
Using the following theorical formula for FMCW radar I get:
Max Range = ( Fs * Tc * c ) / ( 4 * B ) = 7.8125 m <<<<<< DIFFERENT VALUE
Where:
- Fs = ADC Sampling Frequency (ksps) = 12500000 complex_sample / sec
- Tc = ADC Sampling time = Num ADC Samples / Fs = 20 usec
- c = light velocity = 3 *10^8 m/sec
- B = Bandwidth = Frequency Slope * Tc = 2.4GHz
I highlighted with the same color the values usaed in the calcs and reported in the configuration file.
What is it wrong?
Regards,
Lorenzo