


Hi,
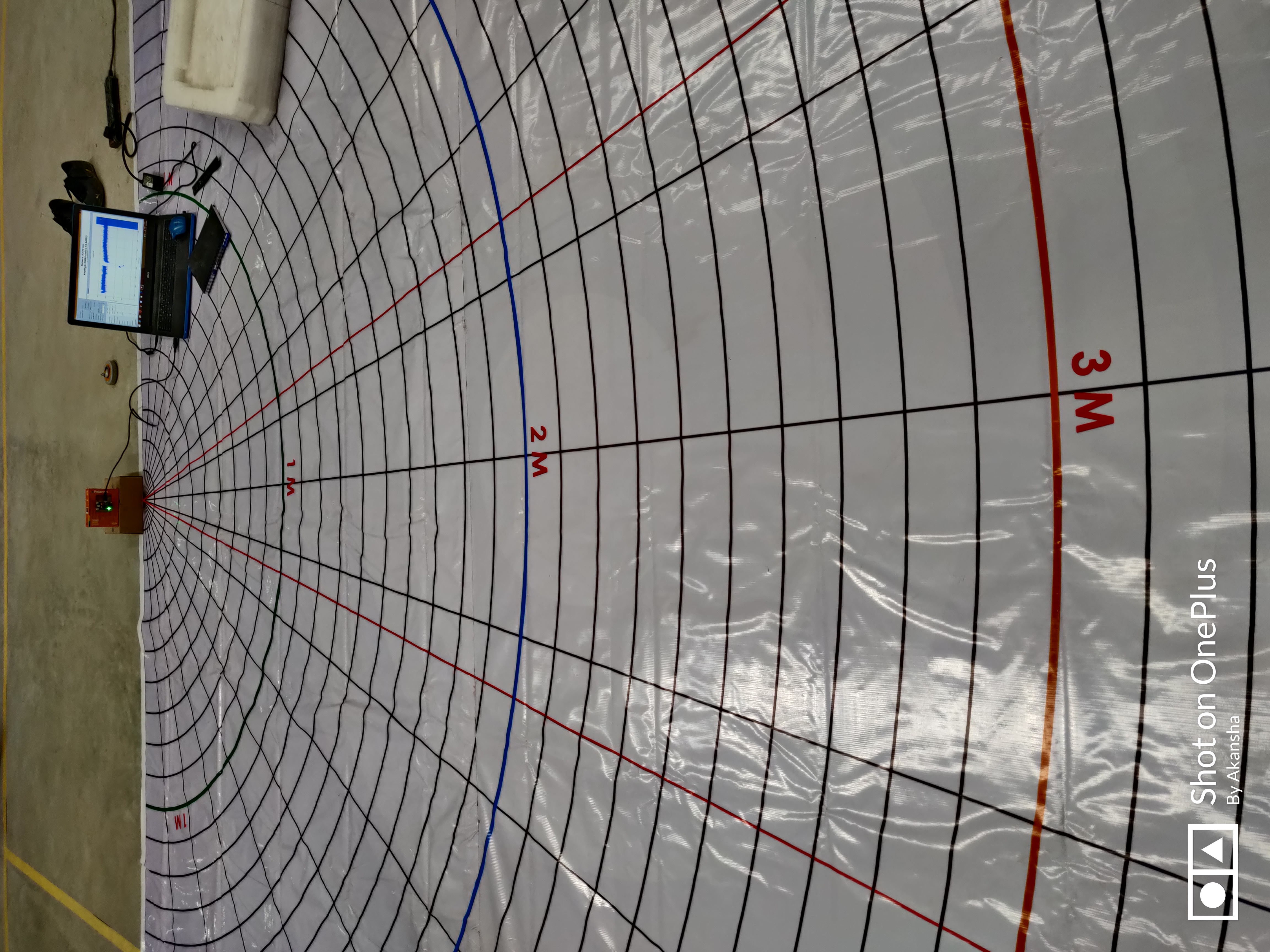
I started working on OPT3101EVM for designing Obstacle Detection Sensor for Robot. I tested this sensor in normal office environment, i will attach setup photo for reference.
Requirements of my sensor are:
- FoV: 180 degree
- Frequency : 50 Hz -60 Hz
- Resolution: 1 mm
- Minimum Distance: 4 cm
- Maximum Distance: 5 m
- Minimum Dimension of Obstacle: 5 cm
When i tested, i found following results:
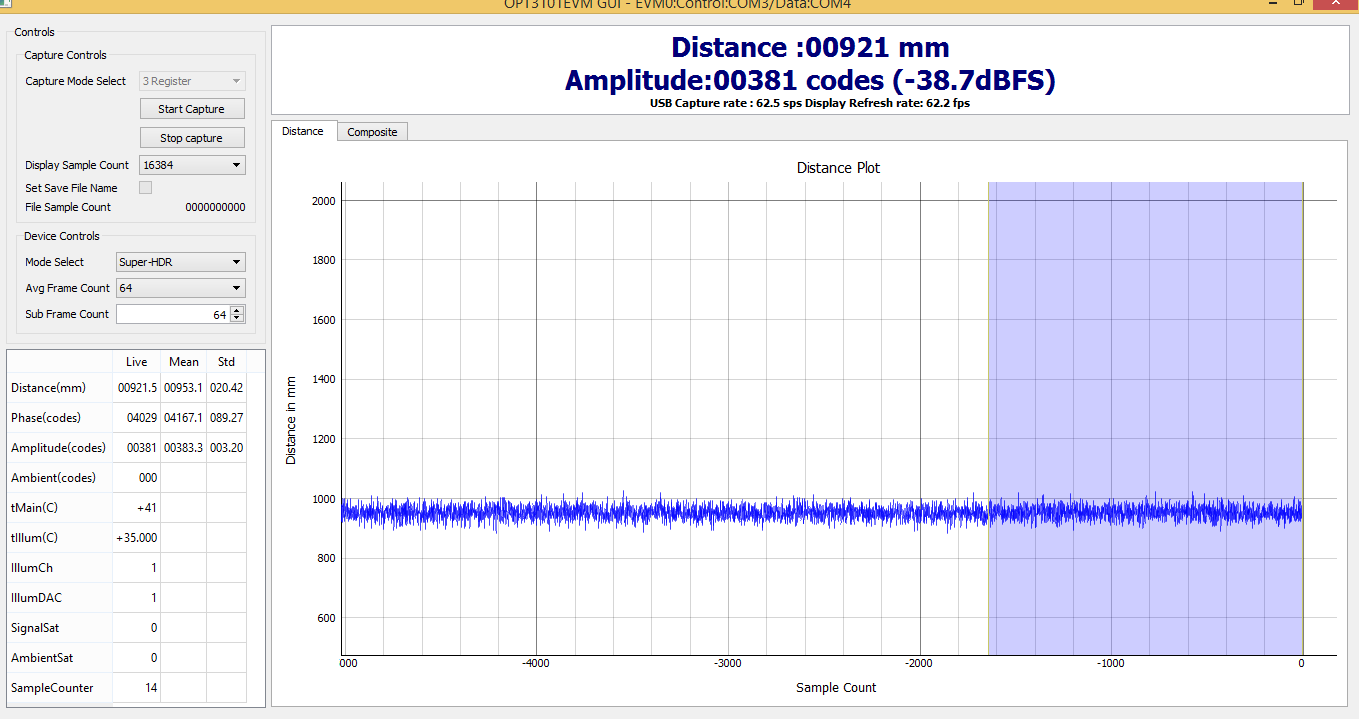
- When i placed the sensor at the height of 5 cm from base and there is no obstacle in front of it, then it started showing random detection at the distance of 1 m from it. When i varied the height to 15 cm then that random detection distance also increases to 3 m. i will attach latte snippets for reference. So can someone please assist me with how to remove this random detection, or what this sensor is detecting? Is this Ground detection?
- When height of sensor from ground is 5 cm and I placed an obstacle of dimension (13 X 7)cm in front of it then:
-
- When the obstacle was kept at distance range of (30 cm - 90 cm) from sensor then it was giving value which was greater than actual distance by (5 - 6)cm.
- When I placed it at 1 m from sensor, then the obtained value was greater than actual value by (3 -4)cm.
- When I further increased distance between sensor and obstacle till 2 m then, when i was increasing the distance in actual by 10 cm then sensor's value was increasing by 6 cm only. At distance 2 m it was giving me the value of 1500 mm
- After 2 m, sensor was not detecting that obstacle.
What is height at which sensor needs to be placed so that i could detect obstacle of dimension (5 X 5)cm with 1 mm Resolution at the distance of at least 3 m from sensor ?
3. When sensor's height is 15 cm from ground and obstacle of dimension (13 X 7)cm is placed at a distance of 1 m from it, then sensor started giving distance value of 1800 mm which is almost 80 cm more from actual value. So please help me how to calibrate the sensor to get the correct results and what parameters need to be calibrated to correct it.
Is there any record of minimum obstacle dimension detected at what distance. Please help me with this query.
Testing Setup:
Latte Snippet when sensor's height = 5 cm:
Latte Snippet when sensor's height = 15 cm:

Regards
Akansha
