A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
I had to test the classic CAN with the CANFD driver. This part of the code needs to be compatible with the IWR6843 program, so you must use the CANFD driver. I write the code according to the CANFD test in SDK, and the Settings are all consistent. Why does this happen?
/* Setup the PINMUX to bring out the XWR18xx CAN pins */ Pinmux_Set_OverrideCtrl(SOC_XWR18XX_PINE14_PADAE, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL); Pinmux_Set_FuncSel(SOC_XWR18XX_PINE14_PADAE, SOC_XWR18XX_PINE14_PADAE_CANFD_TX);
As I said, this code will also be used on IWR6843, so CANFD must be used. Please tell me what the problem is. Or your CANFD Classic CAN cannot be received with ordinary CAN analyzer.
I have made the modification as you said, but I still cannot receive the data. Is there anything else that needs to be set for using classic can? In addition, I saw optionTLV when I checked the test you wrote. Do I need to set it when I use classic can?
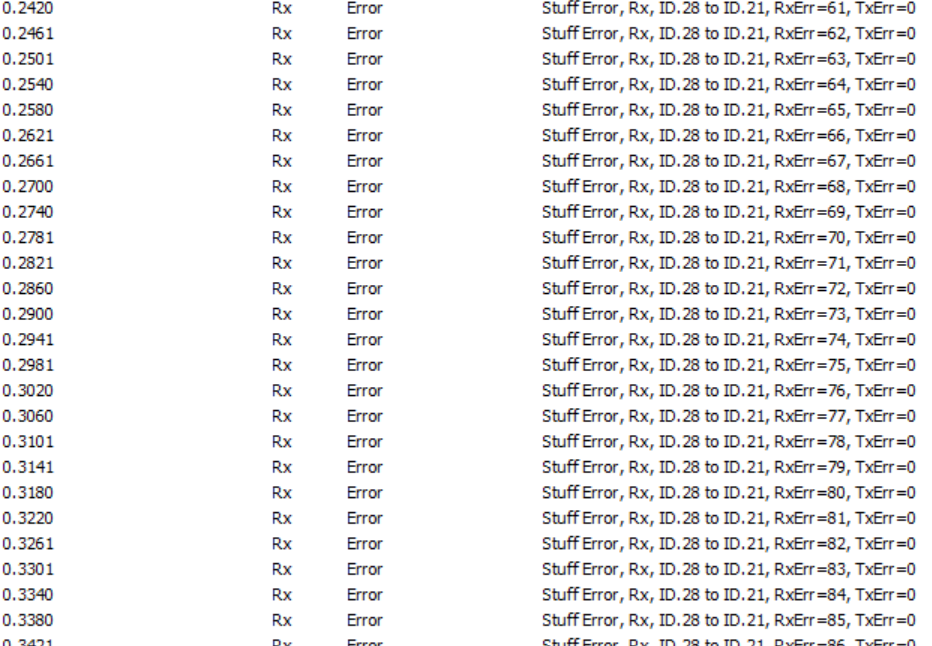
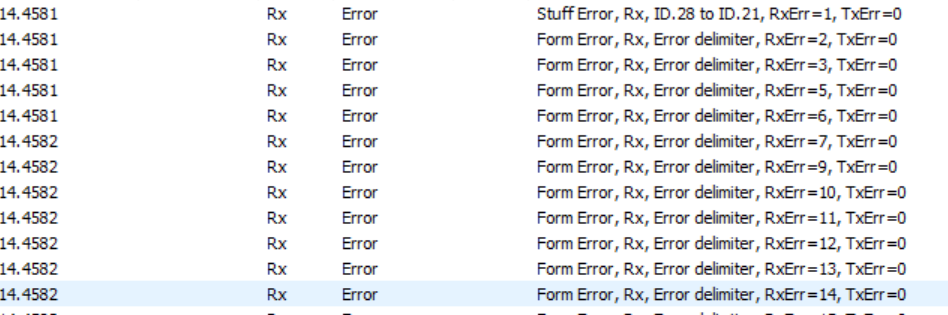
I printed the message of the sending function from the serial port, and found that the return value of the first frame was -1, and from the second frame, I returned -3502 error each time. Why is that?
/* Setup the PINMUX to bring out the XWR18xx CAN pins */ Pinmux_Set_OverrideCtrl(SOC_XWR18XX_PINE14_PADAE, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL); Pinmux_Set_FuncSel(SOC_XWR18XX_PINE14_PADAE, SOC_XWR18XX_PINE14_PADAE_CANFD_TX);
I'm not sure how to fix your exact problem, but I have implemented classical can transmission over canfd on a iwr6843 chip on Mistral's board. I added the following code to the mmwave demo code to send the detected object data. I can't seem to get can receive working though. Hope it helps.
/* Setup the PINMUX to bring out the XWR68xx CANFD-2 pins */ Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINE15_PADAG, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL); Pinmux_Set_FuncSel(SOC_XWR68XX_PINE15_PADAG, SOC_XWR68XX_PINE15_PADAG_CANFD2_TX);
// Set gpio_1 up to select canfd mux for can on mistral module Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINJ13_PADAC, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL); Pinmux_Set_FuncSel(SOC_XWR68XX_PINJ13_PADAC, SOC_XWR68XX_PINJ13_PADAC_GPIO_1); GPIO_setConfig (SOC_XWR68XX_GPIO_1, GPIO_CFG_OUTPUT);
// //write low to gpio_1 GPIO_write (SOC_XWR68XX_GPIO_1, 0U);
return 0; }
void Can_Initalize(void) { int32_t errCode = 0; int32_t retVal = 0; CANFD_MCANInitParams mcanCfgParams; CANFD_MCANBitTimingParams mcanBitTimingParams; CANFD_MCANMsgObjCfgParams rxMsgObjectParams; CANFD_MsgObjHandle rxMsgObjHandle; gTxDoneFlag = 0; gRxDoneFlag = 0; /* Setup the PINMUX to bring out the XWR16xx CAN pins */ PlatformInit();
/* Configure the divide value for MCAN source clock */ SOC_setPeripheralClock(gMmwMssMCB.socHandle, SOC_MODULE_MCAN, SOC_CLKSOURCE_VCLK, 4U, &errCode); /* Initialize peripheral memory */ SOC_initPeripheralRam(gMmwMssMCB.socHandle, SOC_MODULE_MCAN, &errCode);
MCANAppInitParams(&mcanCfgParams); /* Initialize the CANFD driver */ canHandle = CANFD_init(canInstanceId, &mcanCfgParams, &errCode); if (canHandle == NULL) { System_printf("Error: CANFD Module Initialization failed [Error code %d]\n", errCode); return; } /* Configuring 1Mbps and 5Mbps as nominal and data bit-rate respectively Prop seg: 8 Ph seg 1: 6 Ph Seg2 : 5 Sync jump: 1 BRP(Baud rate Prescaler): 2 Nominal Bit rate = (40)/(((8+6+5)+1)*BRP) = 1Mhz Timing Params for Data Bit rate: Prop seg: 2 Ph seg 1: 2 Ph Seg2 : 3 Sync jump: 1 BRP(Baud rate Prescaler): 1 Nominal Bit rate = (40)/(((2+2+3)+1)*BRP) = 5Mhz */ mcanBitTimingParams.nomBrp = 0x2U; mcanBitTimingParams.nomPropSeg = 0x8U; mcanBitTimingParams.nomPseg1 = 0x6U; mcanBitTimingParams.nomPseg2 = 0x5U; mcanBitTimingParams.nomSjw = 0x1U;
Thank you very much for your advice. After I add this statement, the CAN analyzer can receive the data. But this error occurred again when I changed the pin Settings to apply the code to IWR6843. The error code returned is -3502. How to set the SOC_setperipheralclock on IWR6843? thank you