Other Parts Discussed in Thread: TUSS4470, PGA460, TUSS4440, BOOSTXL-TUSS4470
Hello,
I am trying to create a relatively simple device, a fishfinder. The device shall float on water, the transducer and the PCB board are located within its casing. I would love the device to read the depth of the body of water. I would like to utilise the TDC1000, my issue is one its features:
- Measurement Range: Up to 8 ms
which does not appear anywhere else on the datasheet. Is it possible to override this feature? Based on this post , the maximum range is 5.9 meters, whereas I need it to be around 15 meters. Should I switch devices?
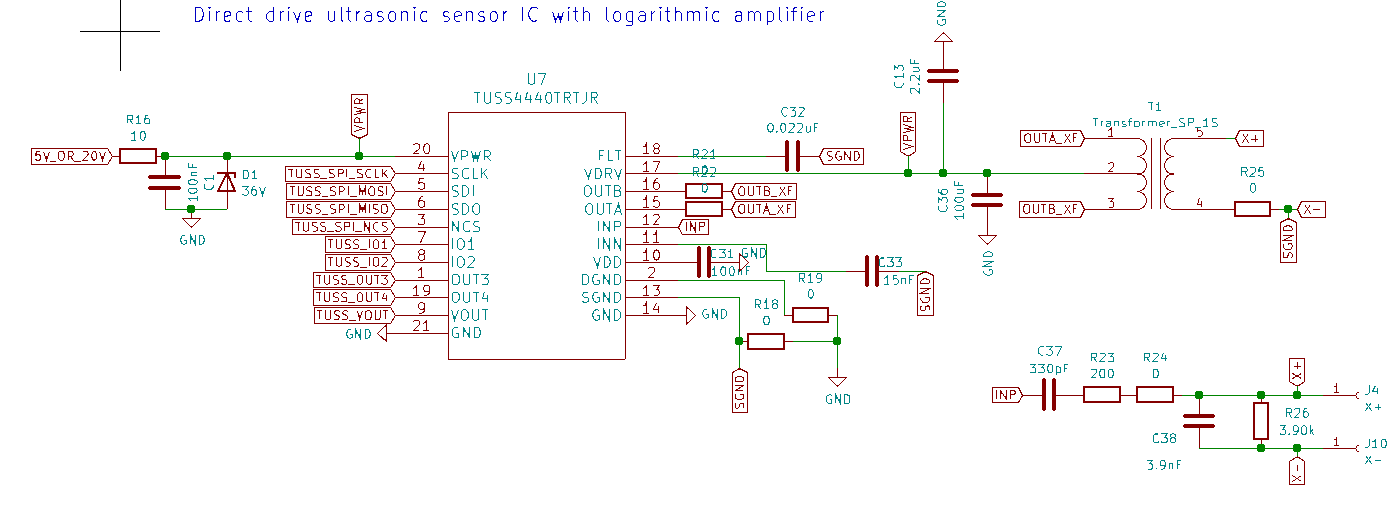
I found also this device, which has the same measurement range. Could someone explain the limitation of those AFE's?