Other Parts Discussed in Thread: MMWAVEICBOOST,
Hi,
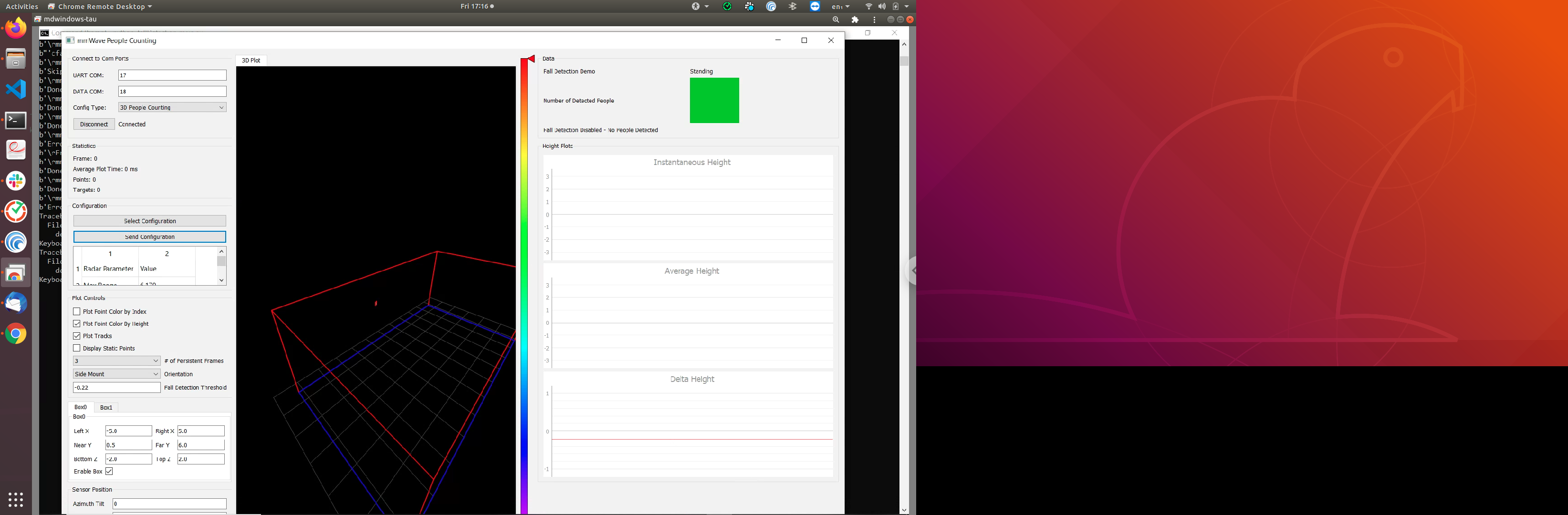
How do i run "Detecting Human Falls and Stance" experiment. Also can i run it with only IWR6843ISK-ODS standalone or do i require mmwaveicboost.
Regards,
vibhav
Hi,
How do i run "Detecting Human Falls and Stance" experiment. Also can i run it with only IWR6843ISK-ODS standalone or do i require mmwaveicboost.
Regards,
vibhav