Hello,
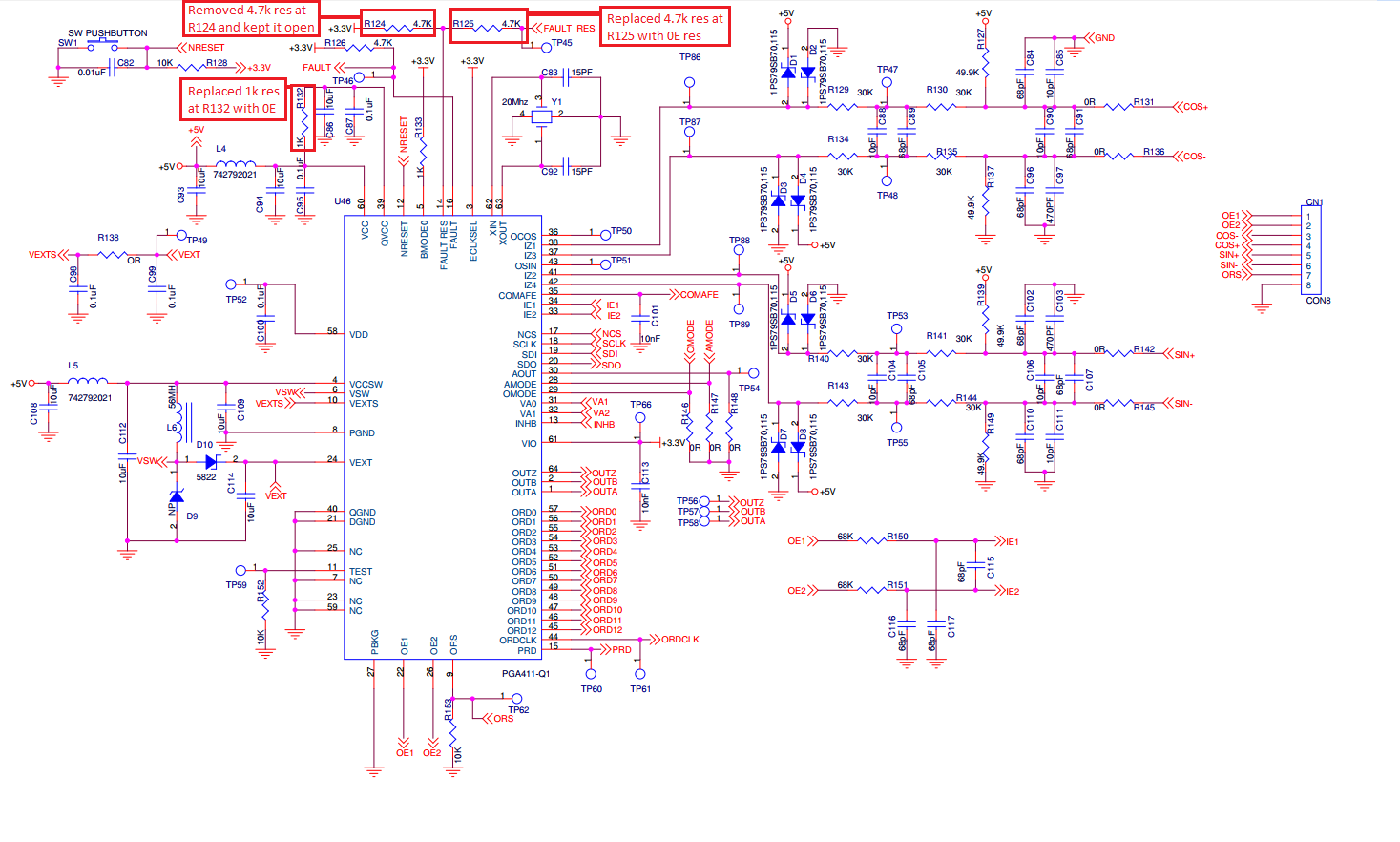
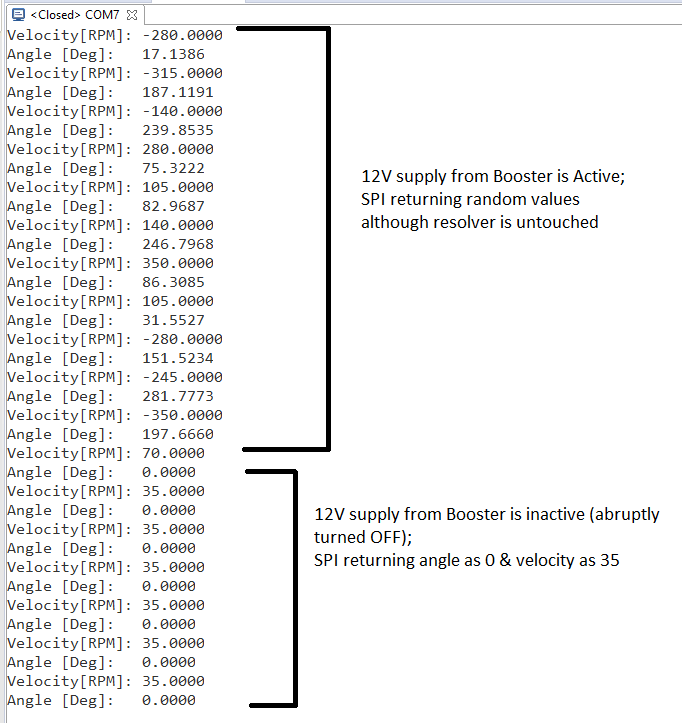
We have used PGA411-Q1 for our application and it is not working as it should. Prior to this, I have interfaced PGA411-Q1EVM with launchpad which gave me the correct readings of the angle and velocity but when the same code is migrated to our custom-designed board, I could not replicate the same behavior. I have tried interfacing the PGA411-Q1EVM board with our board and could replicate the behavior. I am attaching the schematic and observations of our design, please review and help us out. The code is similar to that of the example given for TIDA-00796 with few tweaks.
Thanks and regards,
Abhinav More