Other Parts Discussed in Thread: AWR1843, , IWR1642
Hello,
Currently, I am testing the mrr beam steering lab of automotive toolbox 3.2.0. However, I found the compiled code gives me wrong detection angle in the azimuth plane. Below is my setup.
(1) I am using the default mrr beam steering example code. From here (AWR1843BOOST: MRR Beam Steering Lab for MRR and USRR), I learned the beam steering only applies to the USRR. In my application, I also only use USRR. So I commented "#define SUBFRAME_CONF_MRR_USRR" and uncommented "#define SUBFRAME_CONF_USRR" in both mrr_18xx_dss/common/mrr_config_consts.h and mrr_18xx_mss/common/mrr_config_consts.h. I left everything else as default, namely, I included "#include "mrr_config_chirp_design_USRR30.h" and used the default beam steering settings from -60 to 60 degree with 20 degree in step increase.
(2) I put a car right in front of the radar, like the picture below for testing.


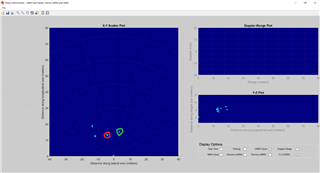
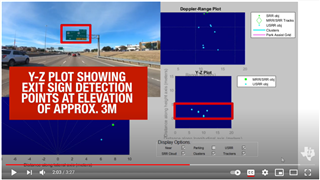
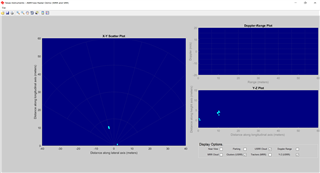
(3) However, the testing shows me the wrong angles in both the azimuth and elevation plane as the picture below.
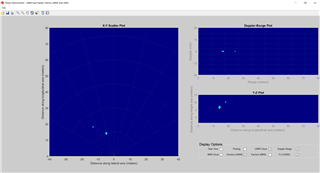
From the picture above, we can see the car was detected. However, the angle in azimuth plane and height (Z) were wrong. It showed the car was detected at around 14-16 meters away at more than -15 degree in the azimuth plane and the height was detected more than 5 meters. In fact, the car was right in front of the radar and the car itself is less than 2 meters.
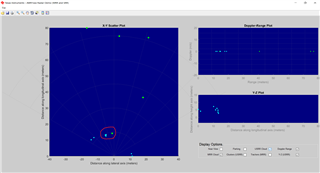
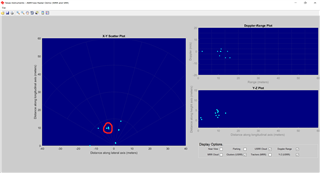
(4) To verify my guess, I stand in front of the radar and move back slowly. During this time, the radar can detect me. However, it detected me in the wrong angle in the azimuth plane (the same direction as the car).
I am guessing, something was not working properly from the given mrr beam steering lab code. I am using the lab code from automotive toolbox 3.2.0. Any suggestions on how this wrong but consistent detections (angle and height) happens?
Thank you so much!
Best,
Hang