Other Parts Discussed in Thread: IWR6843, IWR6843AOP,
Hi, I am looking at IWR6843 isk-ods using the ROS diver.
I am on a moving platform and I have noticed the following: Detection are rear stright infront of the sensor. Even when I put reflectors there.
The picture shows all detections from a run during 1 min.
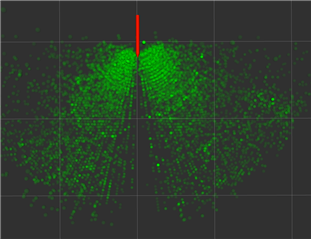
Question 1: Why is this? The lobe of the antenna is the strongest here and the angular resolution should be the smallest.Is there a physical explanation or how to fix this? or is it boundry effects in fft?
Question 2: I have noticed that ROS does not have IWR6843ISK-ODS cfg. We will evaluate IWR6843AOP, Will this be present there as well?
Setup:
I have flashed the ODS with the pointclould binary from the 3.5 version of the SDK.
I have tried the default 6843AOP_3d cfg also I have modified it to look like:
I use the launch file:
Best regards