Other Parts Discussed in Thread: AWR1642
Hi,
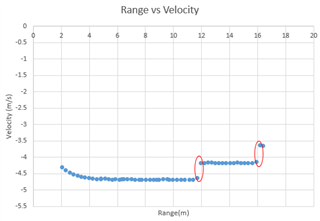
1) In SRR Demo, what is the velocity resolution(in m/s) of tracked objects provided by AWR1642 BOOST ?
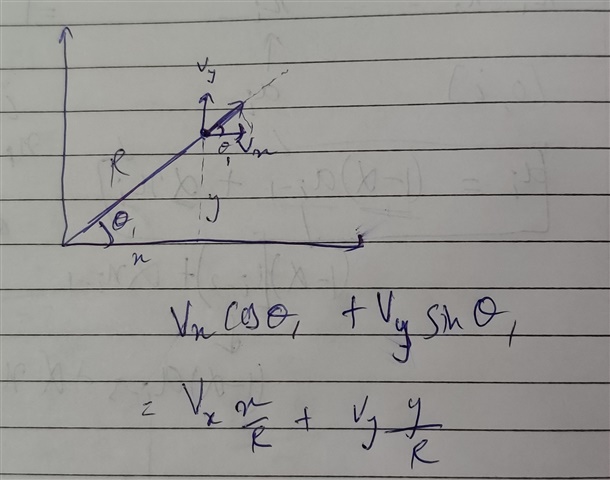
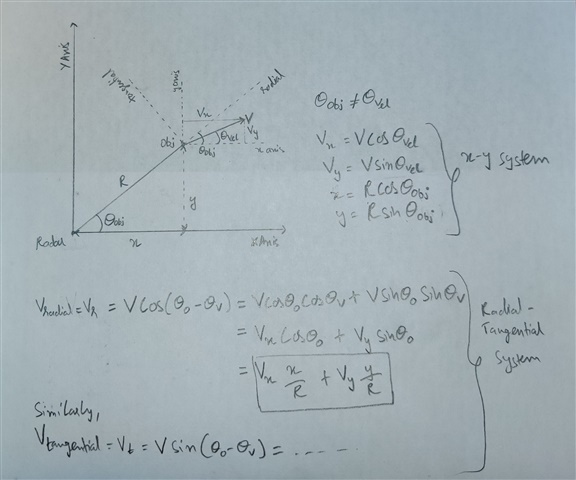
2) In SRR demo , Doppler velocity is given as (Vy.y+Vx.x)/R
What does this signify?
Is it performed to convert the doppler into radial velocity?
BR
Sreenath