Other Parts Discussed in Thread: AWR1642
Hi,
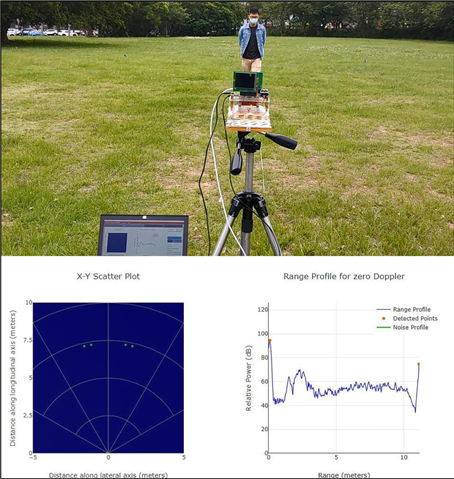
we tried to use the AWR1642 EVM and mmWave demo visualizer to detect a human moving towards and away from the radar along the
DOA = 0 degree direction.
We got multiple detection points which may be considered as two clusters:
The two clusters are distributed around the left side and the right side of the moving person;
it seems that the cluster distribution are symmetric about the person.
The farther the distance between the radar and the moving person is, the larger the separation between the two clusters is.
The separation between the two clusters is larger than 3 meters when the distance between the radar and the person is larger
than 7.5 meter according the "X-Y Scatter Plot" shown in mmWave demo visualizer.
Our questions:
1. Why does the radar return such detection result?
2. Are there any parameters we could adjust to get correct detection point?
Thanks for your help.
Edward Lee
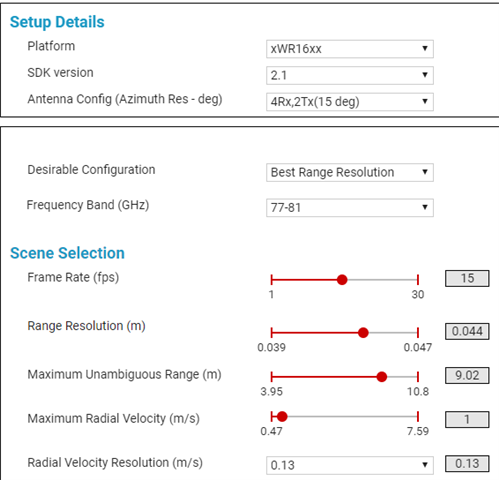
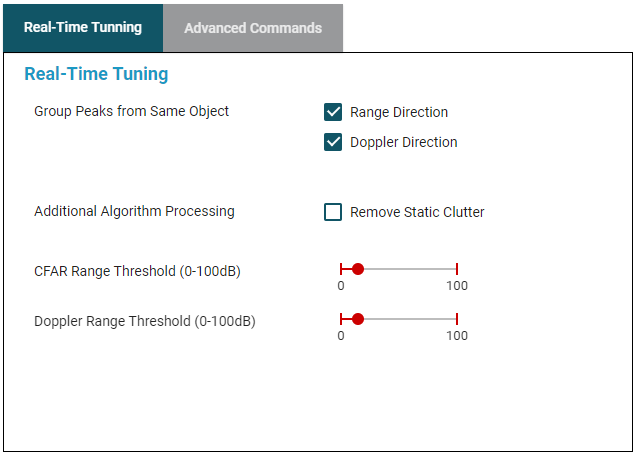
our radar settings:
detection result: