Other Parts Discussed in Thread: IWR6843,
Hi experts,
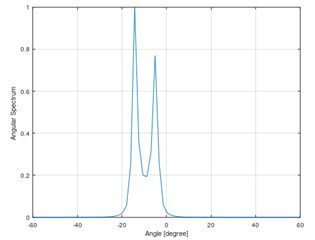
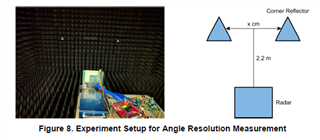
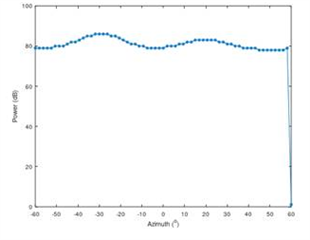
I'm using the IWR6843-ISK ODS EV board but I refering a document (SWRA549.pdf) to check the angle resolution (separation).
The measurement result from IWR6843 EV board is similar to the document SWRA549, the angle apart should larger than at least 40 degree for scenario of 4 virtual antennas.
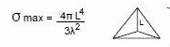
Q1: Have any theoretical formula to calculate the "minimum angle apart" instead of measurement?
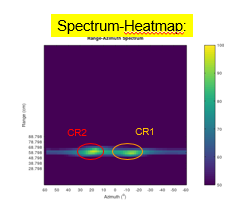
I'm trying to do the demo of "overhead_mount_occupancy". Because of the bad angular separation, the targets at zone 3 (left side on the second row) and zone 4 (middle seat on the second row) cannot be separated easily (or targets at zone 4 and zone 5) and it causes miss alert.
Q2: May I know why TI chose the Capon beamforming to estimate angles (what's the benefit)? Does TI have any suggestion to overcome this situation with the same model?
Thanks,
Best Regards,
Jack