


Other Parts Discussed in Thread: IWR6843ISK
I am doing a project on people identification using IWR6843ISK-ODS. What is the frame rate? How does the saved output looks like? Where I can save it?
I am doing a project on people identification using IWR6843ISK-ODS. What is the frame rate? How does the saved output looks like? Where I can save it?


 This is my data saved as csv file. My purpose is identification of people. Here there is no subframes. How to add that?
This is my data saved as csv file. My purpose is identification of people. Here there is no subframes. How to add that?
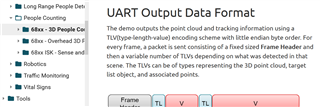
 This says about the point cloud. The output that we obtain in people trackinga nd counting is their localized information after working on point cloud. That point cloud is what I want.
This says about the point cloud. The output that we obtain in people trackinga nd counting is their localized information after working on point cloud. That point cloud is what I want.