Other Parts Discussed in Thread: IWR1642
Hi,
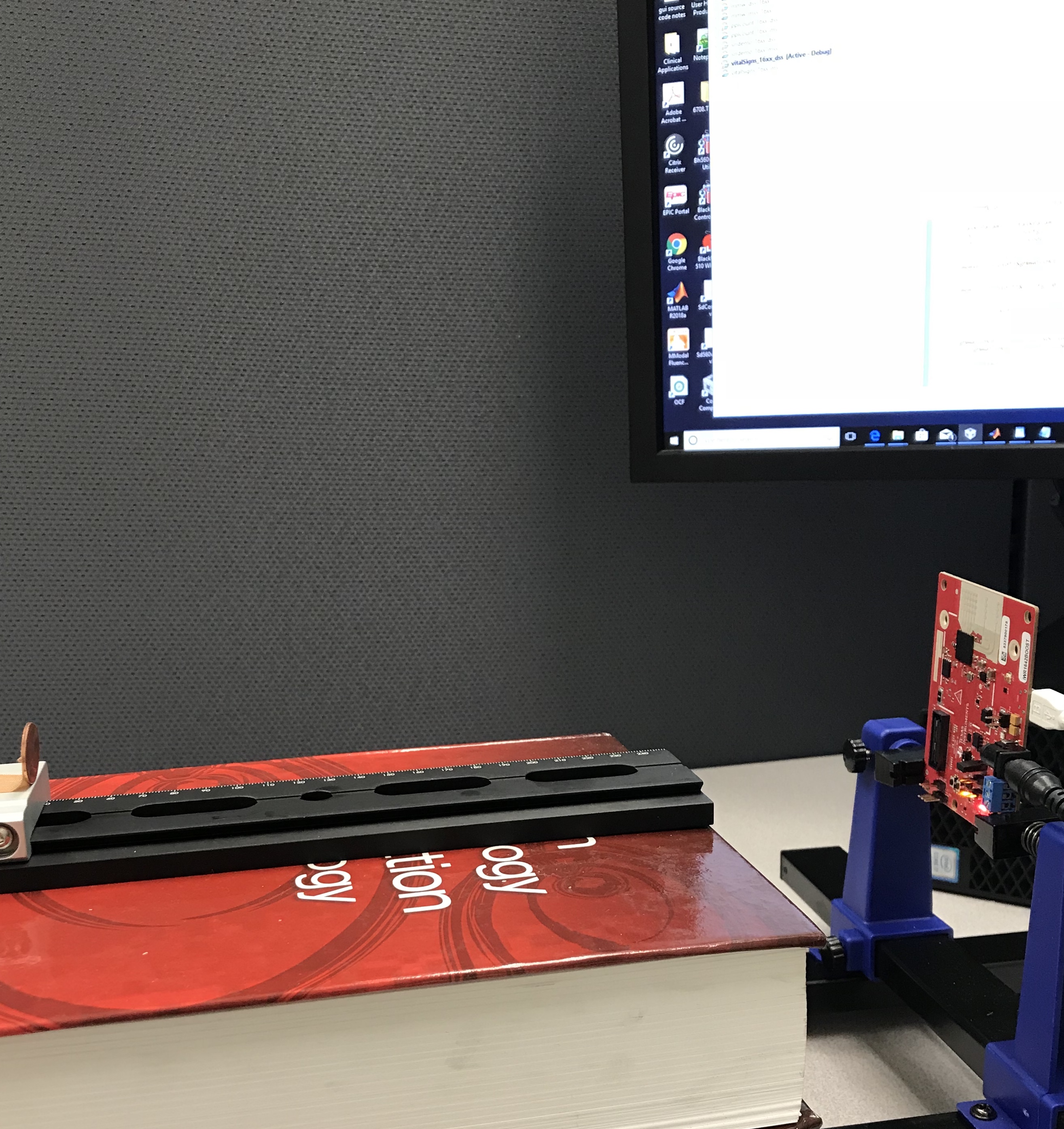
I am trying to assess the accuracy and precision of the IWR1642's range measurement in the High Accuracy Lab. My setup is shown below. I know the distance from the object (a copper penny) to the edge of the textbook is exactly 0.20 m, and I have used a tape measure to determine that the distance from the edge of the textbook to the sensor is about 0.10 m (+/- 0.001 m). Therefore the distance from sensor to object is about 0.30 m (+/- 0.001 m). I have found that the measurements reported on the GUI are consistently off by 0.07 to 0.08 m, reporting values of 0.37 to 0.38 m. This occurs even when I significantly restrict the last two values (minimum and maximum range) in the RangeLimitCfg to 0.20 and 0.40.
The device is clearly very precise (the range measurement rarely varies by more than 1 mm). However, it is consistently inaccurate, and I am having trouble understanding why. I understand that there will always be a slight inaccuracy due to the crude setup, but 7-8 cm seems like an awful lot (especially given the title of the lab).
Here is the configuration I am using:
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 1 1 0
adcCfg 2 1
adcbufCfg 0 1 1 1
profileCfg 0 77 7 7 114.4 0 0 33.71 1 512 5000 0 0 48
chirpCfg 0 0 0 0 0 0 0 1
frameCfg 0 0 10 0 500 1 0
lowPower 0 1
guiMonitor 1 1 0 0 0 1
RangeLimitCfg 2 1 0.20 0.40
sensorStart
Here is the setup:
Regards,
Josh