Other Parts Discussed in Thread: LM5148, LMG3100R044, PMP23392
Tool/software:
Hello TI,
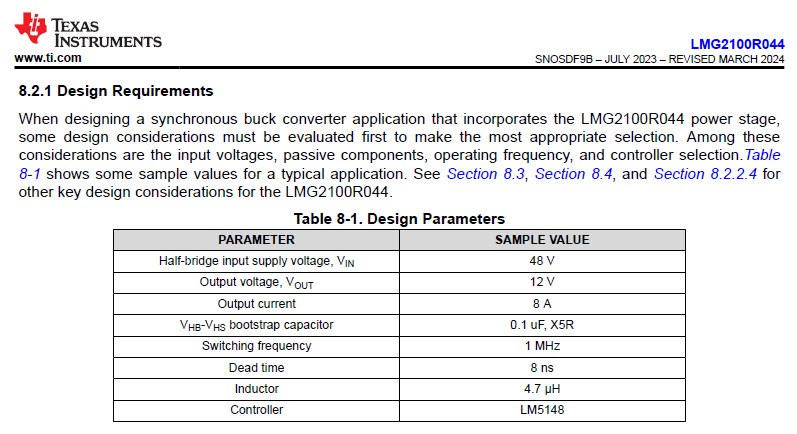
On this moment we are into a design of a Dual phase 500kHz 40 A synchronous Buck regulator, with a voltage input range from 19.2V to 52V and a total power of 40A at 12V output.
For the Buck regulators, we will use into dual-phase mode, two pieces of LM5148 and two pieces of LMG2100R044.
We already noticed that the SW pin of the LM5148 should connect to PGND, but maybe there are settings needed to have the correct connection to the GanFet LMG2100R044.
Are there constraints into this combination and do you have a recommended circuit diagram?
Can we make use of the internal LDO 5-V VCC of the LM5148 to supply LMG2100R044?
Best regards,
Stephan