


Part Number: ADS127L18EVM-PDK
Other Parts Discussed in Thread: ADS127L18, MSPM0G3507, TXB-EVM
Good afternoon,
The following repository contains our edited version of the P. Edwards code. In the original Pedwards code he uses two spi peripherals for two data lanes and uses bit banging gpios as the spi controller. However for our application we only require one spi peripheral for data acquisition and the other spi set for the controller, eliminating the need for the bit banging gpios.
In our implementation:
-
One SPI peripheral is used to receive ADC data.
-
A second SPI data path maps DOUT0 and DCLK for DMA-based data transfer.
-
One SPI controller is used to configure and change the ADC registers.
-
We are not using GPIO bit-banging as in the original P. Edwards implementation.
-
START and RESET are mapped to GPIOs.
-
We are using DOUT0 and DCLK with a single data lane.
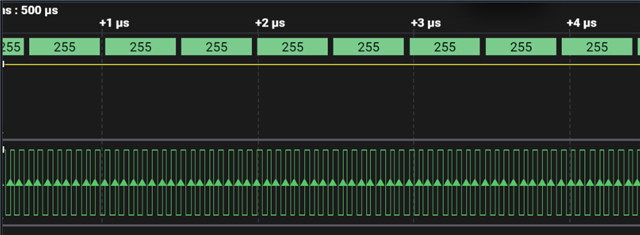
At the moment, we are receiving numbers in gRxPacket, but the channel inputs are unpopulated. Regardless of whether an external input is applied, such as from a function generator, the values remain seemingly random in the 0–255 range.
Additionally, we would like to verify that the SPI controller is functioning correctly. In the main code file, MSPM0xADS127L18.c, I am able to use the single-register read and write functions and see the expected output in the watch variable for the speed check variable. However, I am unable to correctly read the device ID. It appears as 0, even though it should be 6.
Would you be able to help us identify what may be causing this issue, and suggest the best way to verify that SPI communication with the ADS127L18 is working properly?
Updated PEdwards Code (disregard the readme) : https://github.com/JesusPinzon4803/MSPM03507xADS127L18
Original Edwards Code: https://github.com/TexasInstruments/precision-adc-examples/blob/main/devices/ads127l18/MSPM0_example/README.md
Thank you.





{kind=link}