The intent is to see in real-time mode (for targets that support this feature, such as 66x DSP cores) some variables in a running system (that wasn't loaded and run using CCS debugger). Is it possible to non-intrusively connect to a running target and enable real-time mode? So steps on a running system would be :
1. Bring up CCS.
2. launch target.
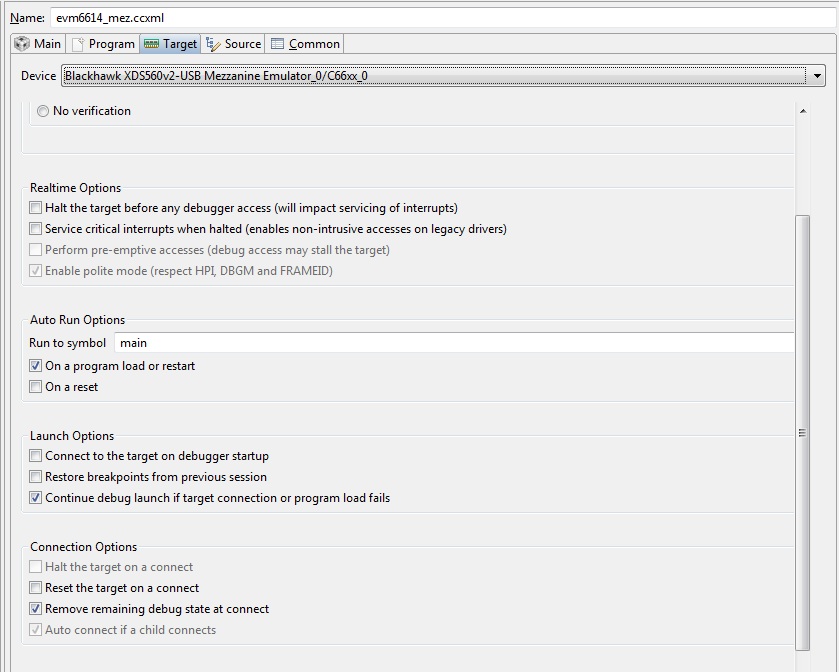
3 Connect non-intrusively i.e connection is established but cores are not stopped.
4. Load symbols only on the cores.
5. Enable real-time mode.
6. Examine variables of interest in watch window, memory window etc, whatever is possible in real-time mode.