


Part Number: MSP430FR5994
Tool/software: Code Composer Studio
Hey,
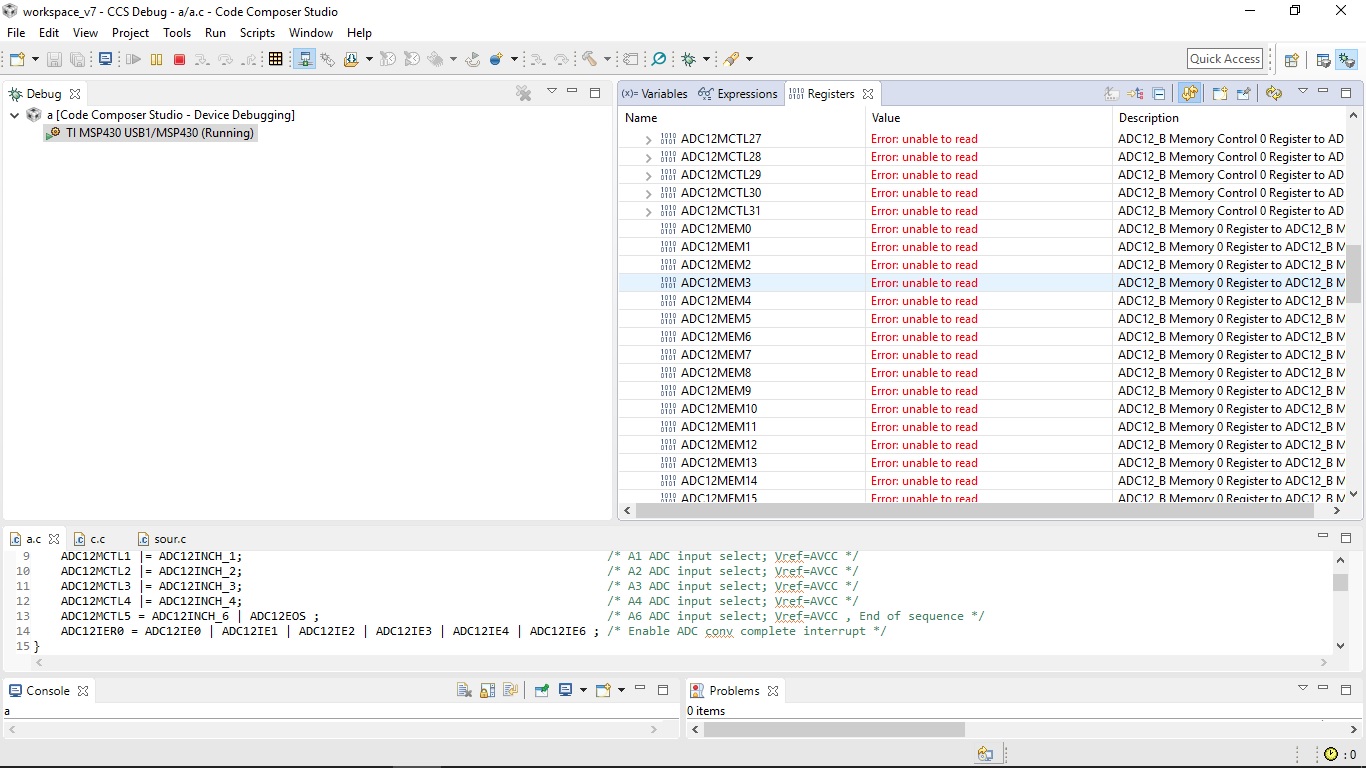
I am trying to code the ADC and when I tried to see the data in the watch window it is showing "Error: Unable to Read
The code which I build is :
#include <msp430.h>
void adcinit ()
{
ADC12CTL0 = ADC12SHT0_2 | ADC12ON | ADC12MSC; /* Sampling time, S&H=16, ADC12 on */
ADC12CTL1 = ADC12SHP | ADC12CONSEQ0 | ADC12CONSEQ1; /* Use sampling timer */
ADC12CTL2 |= ADC12RES_2; /* 12-bit conversion results */
ADC12MCTL0 |= ADC12INCH_0; /* A0 ADC input select; Vref=AVCC */
ADC12MCTL1 |= ADC12INCH_1; /* A1 ADC input select; Vref=AVCC */
ADC12MCTL2 |= ADC12INCH_2; /* A2 ADC input select; Vref=AVCC */
ADC12MCTL3 |= ADC12INCH_3; /* A3 ADC input select; Vref=AVCC */
ADC12MCTL4 |= ADC12INCH_4; /* A4 ADC input select; Vref=AVCC */
ADC12MCTL5 = ADC12INCH_6 | ADC12EOS ; /* A6 ADC input select; Vref=AVCC , End of sequence */
ADC12IER0 = ADC12IE0 | ADC12IE1 | ADC12IE2 | ADC12IE3 | ADC12IE4 | ADC12IE6 ; /* Enable ADC conv complete interrupt */
}
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // Stop WDT
__bis_SR_register(GIE);
// Disable the GPIO power-on default high-impedance mode to activate
// previously configured port settings
PM5CTL0 &= ~LOCKLPM5;
adcinit();
}
void __attribute__ ((interrupt(ADC12_VECTOR))) ADC12_ISR (void)
{
switch(__even_in_range(ADC12IV, ADC12IV_ADC12RDYIFG))
{
case ADC12IV_NONE: break; // Vector 0: No interrupt
case ADC12IV_ADC12OVIFG: break; // Vector 2: ADC12MEMx Overflow
case ADC12IV_ADC12TOVIFG: break; // Vector 4: Conversion time overflow
case ADC12IV_ADC12HIIFG: break; // Vector 6: ADC12BHI
case ADC12IV_ADC12LOIFG: break; // Vector 8: ADC12BLO
case ADC12IV_ADC12INIFG: break; // Vector 10: ADC12BIN
case ADC12IV_ADC12IFG0: break; // Vector 12: ADC12MEM0
case ADC12IV_ADC12IFG1: break; // Vector 14: ADC12MEM1
case ADC12IV_ADC12IFG2: break; // Vector 16: ADC12MEM2
case ADC12IV_ADC12IFG3: break; // Vector 18: ADC12MEM3
case ADC12IV_ADC12IFG4: break; // Vector 20: ADC12MEM4
case ADC12IV_ADC12IFG5: break; // Vector 22: ADC12MEM5
case ADC12IV_ADC12IFG6: break; // Vector 24: ADC12MEM6
case ADC12IV_ADC12IFG7: break; // Vector 26: ADC12MEM7
case ADC12IV_ADC12IFG8: break; // Vector 28: ADC12MEM8
case ADC12IV_ADC12IFG9: break; // Vector 30: ADC12MEM9
case ADC12IV_ADC12IFG10: break; // Vector 32: ADC12MEM10
case ADC12IV_ADC12IFG11: break; // Vector 34: ADC12MEM11
case ADC12IV_ADC12IFG12: break; // Vector 36: ADC12MEM12
case ADC12IV_ADC12IFG13: break; // Vector 38: ADC12MEM13
case ADC12IV_ADC12IFG14: break; // Vector 40: ADC12MEM14
case ADC12IV_ADC12IFG15: break; // Vector 42: ADC12MEM15
case ADC12IV_ADC12IFG16: break; // Vector 44: ADC12MEM16
case ADC12IV_ADC12IFG17: break; // Vector 46: ADC12MEM17
case ADC12IV_ADC12IFG18: break; // Vector 48: ADC12MEM18
case ADC12IV_ADC12IFG19: break; // Vector 50: ADC12MEM19
case ADC12IV_ADC12IFG20: break; // Vector 52: ADC12MEM20
case ADC12IV_ADC12IFG21: break; // Vector 54: ADC12MEM21
case ADC12IV_ADC12IFG22: break; // Vector 56: ADC12MEM22
case ADC12IV_ADC12IFG23: break; // Vector 58: ADC12MEM23
case ADC12IV_ADC12IFG24: break; // Vector 60: ADC12MEM24
case ADC12IV_ADC12IFG25: break; // Vector 62: ADC12MEM25
case ADC12IV_ADC12IFG26: break; // Vector 64: ADC12MEM26
case ADC12IV_ADC12IFG27: break; // Vector 66: ADC12MEM27
case ADC12IV_ADC12IFG28: break; // Vector 68: ADC12MEM28
case ADC12IV_ADC12IFG29: break; // Vector 70: ADC12MEM29
case ADC12IV_ADC12IFG30: break; // Vector 72: ADC12MEM30
case ADC12IV_ADC12IFG31: break; // Vector 74: ADC12MEM31
case ADC12IV_ADC12RDYIFG: break; // Vector 76: ADC12RDY
default: break;
}
}
Thank you in advance.
Viswanath