


I am a new TI FAE for Arrow and have a customer question;
I noticed in the CC Quick Start Guide (under the section "To add files to a project"), that we can use "Link Files to Project" instead of "Add Files to Project".
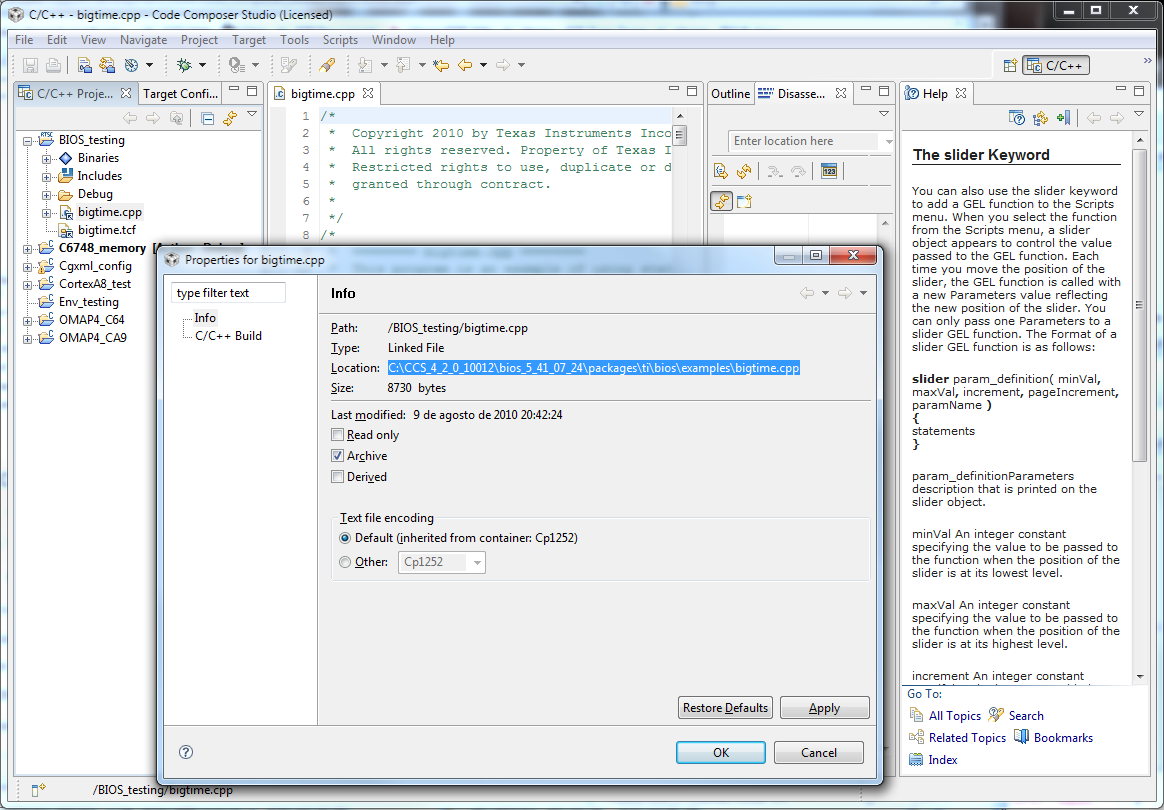
They indicate that "Link Files to Project" creates a reference to the file and "Add Files to Project" makes a physical copy of the file and adds it to the project folder.
I tried "Add Files to Project" last night and it works as indicated. It creates a copy of the file in the main directory. When I edit the file the copy in the main directory changes but the original file in the sub-directory does not change.
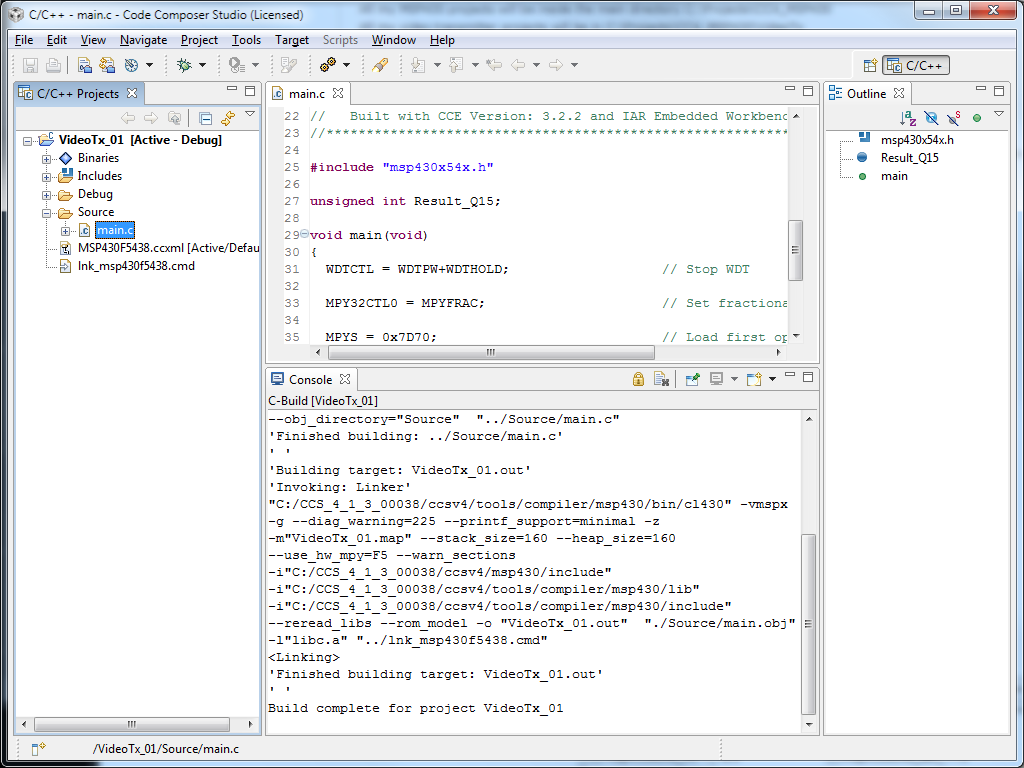
Today I tried "Link Files to Project" but it does not seem to work as indicated. When I move the mouse over the file name it indicates the file is in the main project directory, but it is not there and the Build generates an error indicating it can not find the file.
I tried adding the path using the Projects -> Options but that did not make any difference.
Comments.........


{kind=link}
{kind=link}
{kind=link}