Part Number: TMS570LS3137
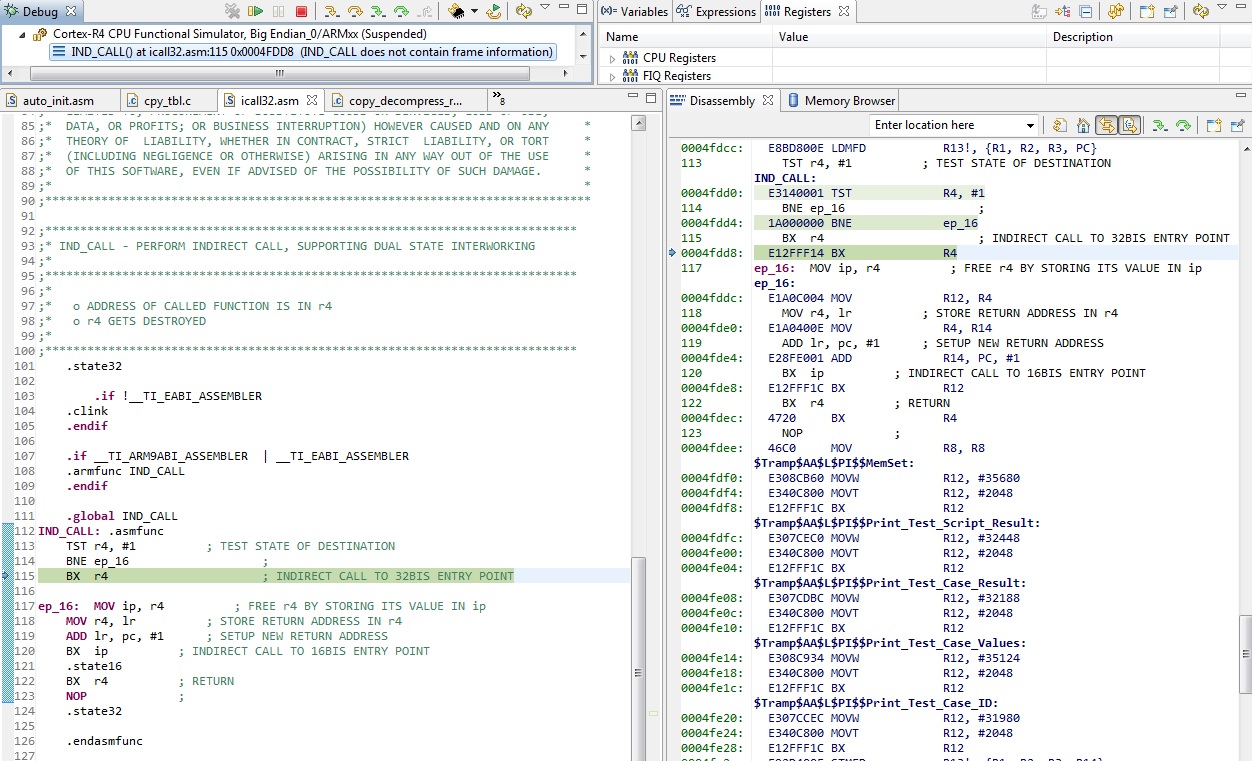
I am trying to understand the functionality of library files associated with __TI_auto_init (files present in rtssrc.zip). To start with, from auto_init.asm, control goes to icall32.asm (IND_CALL assembly routine) and after analyzing I found control always branches at an instruction BX r4 and never get into BNE ep_16 label. Can anyone help me to understand how I can access the instructions present under ep_16 label. What is the purpose of BNE ep_16 instructions? If anyone can suggest any design document from TI regarding these library files (in "\ti\ccsv5\tools\compiler\arm_5.0.4\lib\rtssrc.zip") it will be very helpful to me.
For your reference I am attaching the screenshot of CCS debugging window.
Thanks.