Other Parts Discussed in Thread: EK-TM4C129EXL, EK-TM4C1294XL
Tool/software: Code Composer Studio
Hi,
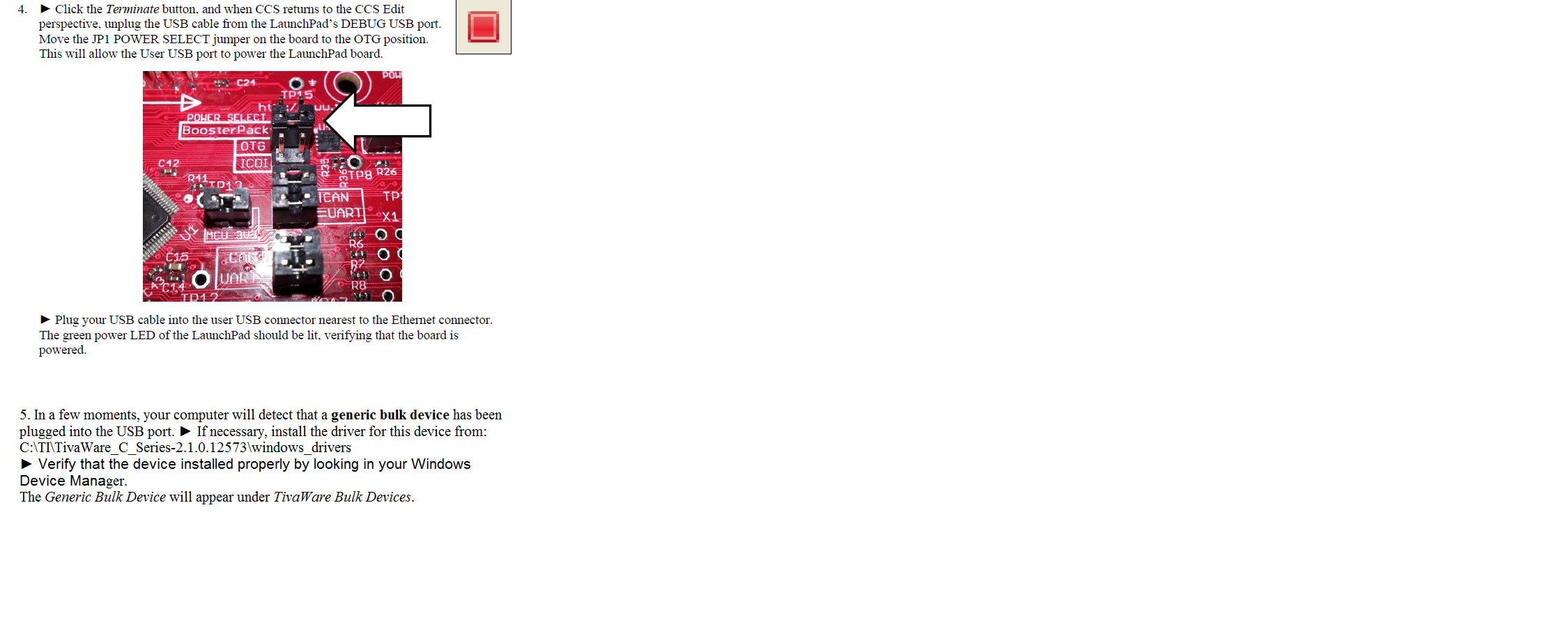
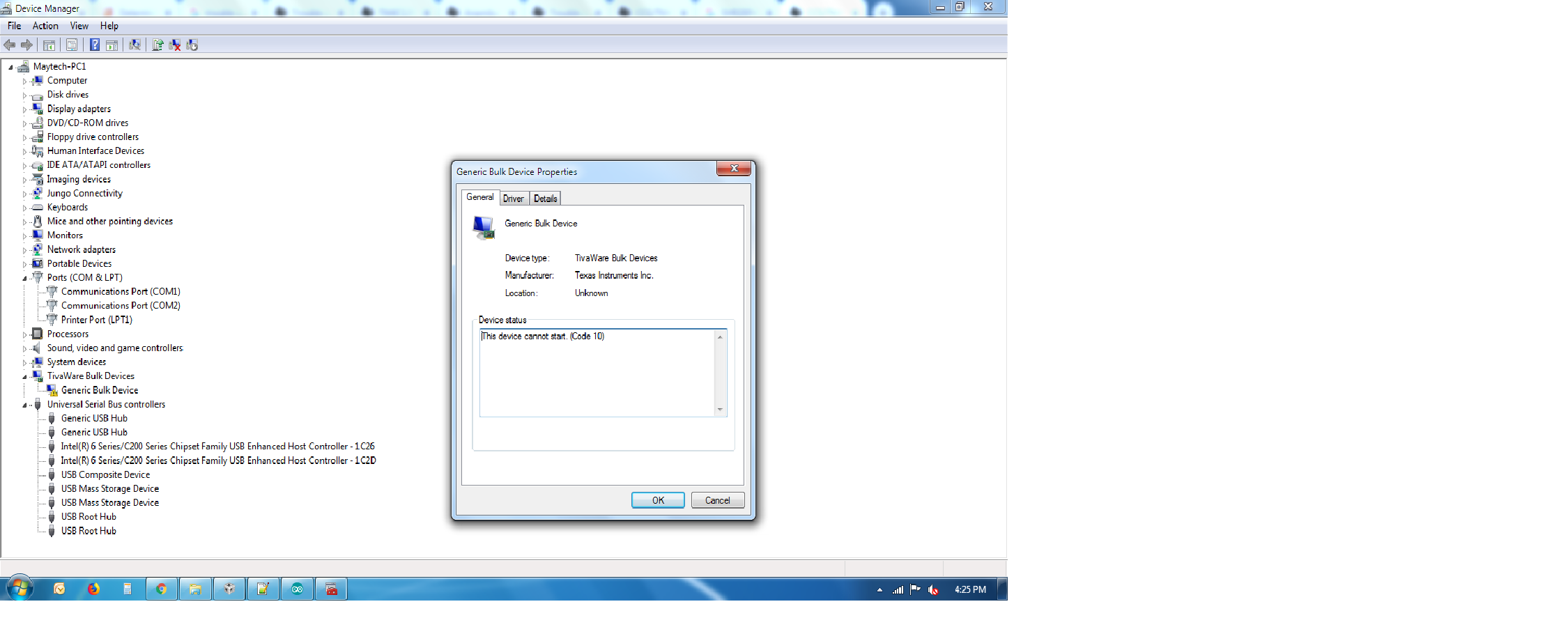
I have dump the usb_dev_bulk example (C:\ti\TivaWare_C_Series-2.1.4.178\examples\boards\ek-tm4c129exl\usb_dev_bulk). After dumping the code I was removed the USB cable and changed the JP1 POWER
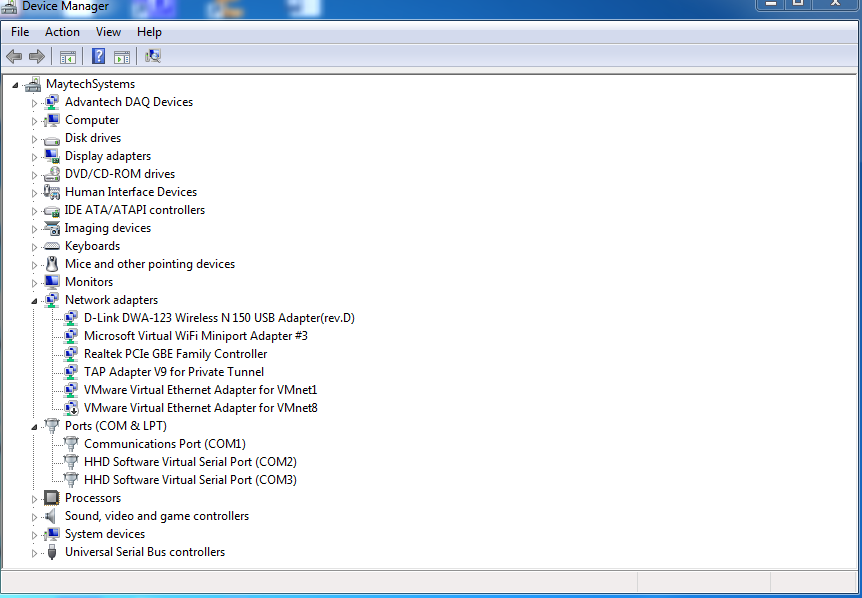
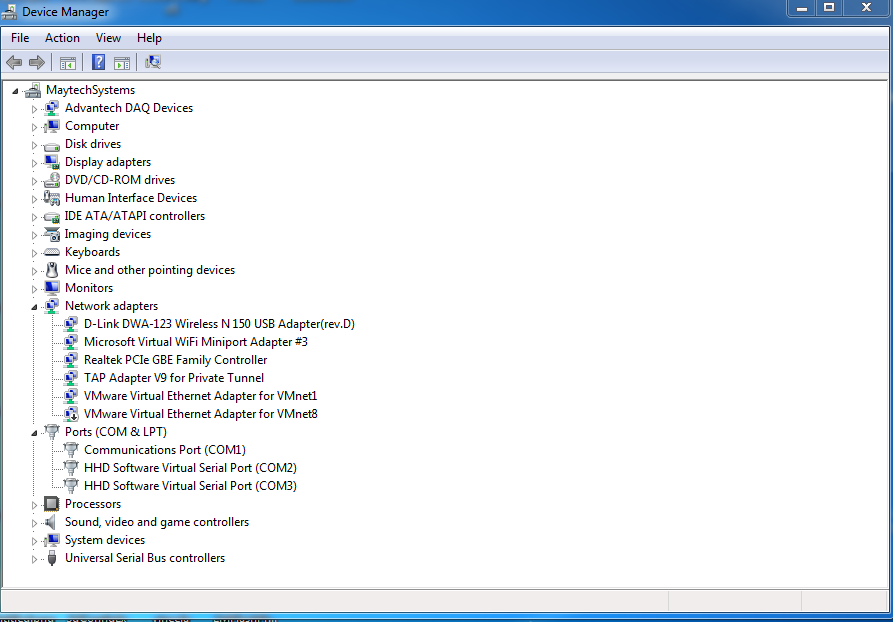
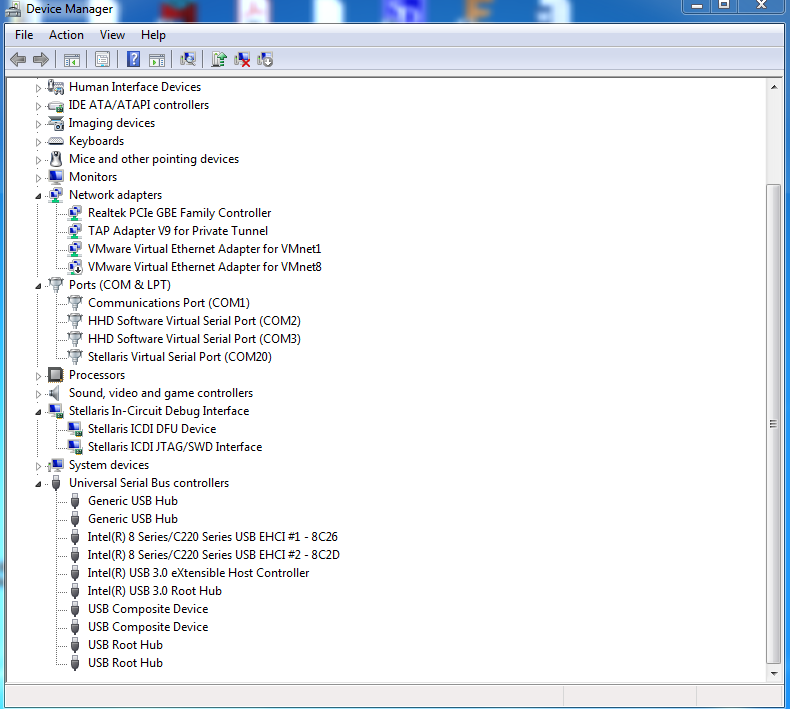
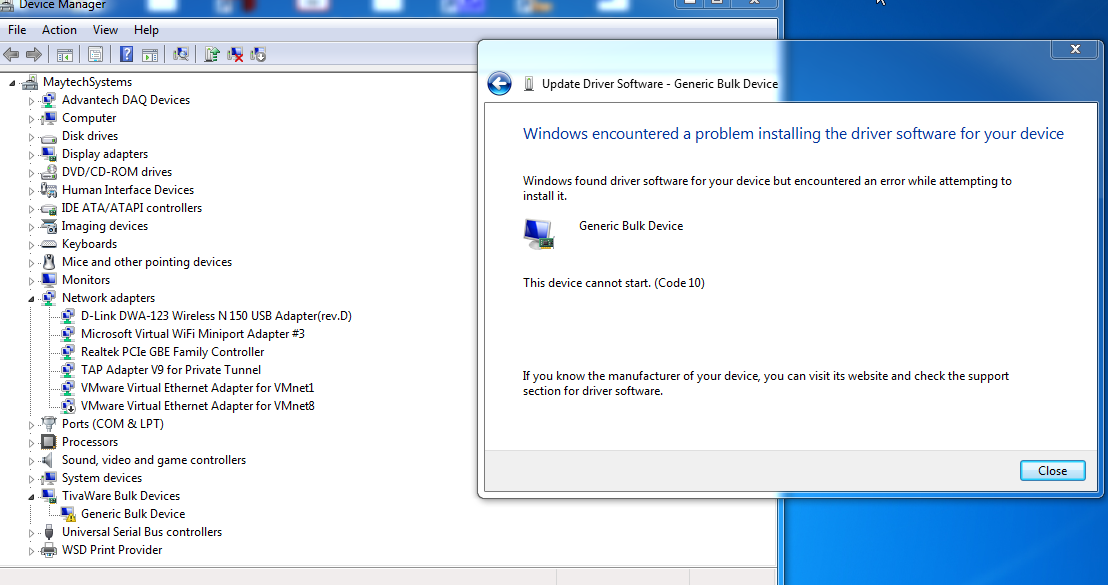
SELECT from ICDI to OTG position and connected the USB cable which is beside to the Ethernet port. In device manager it has to show the Generic Bulk Device under TivaWare Bulk Devices but it is not
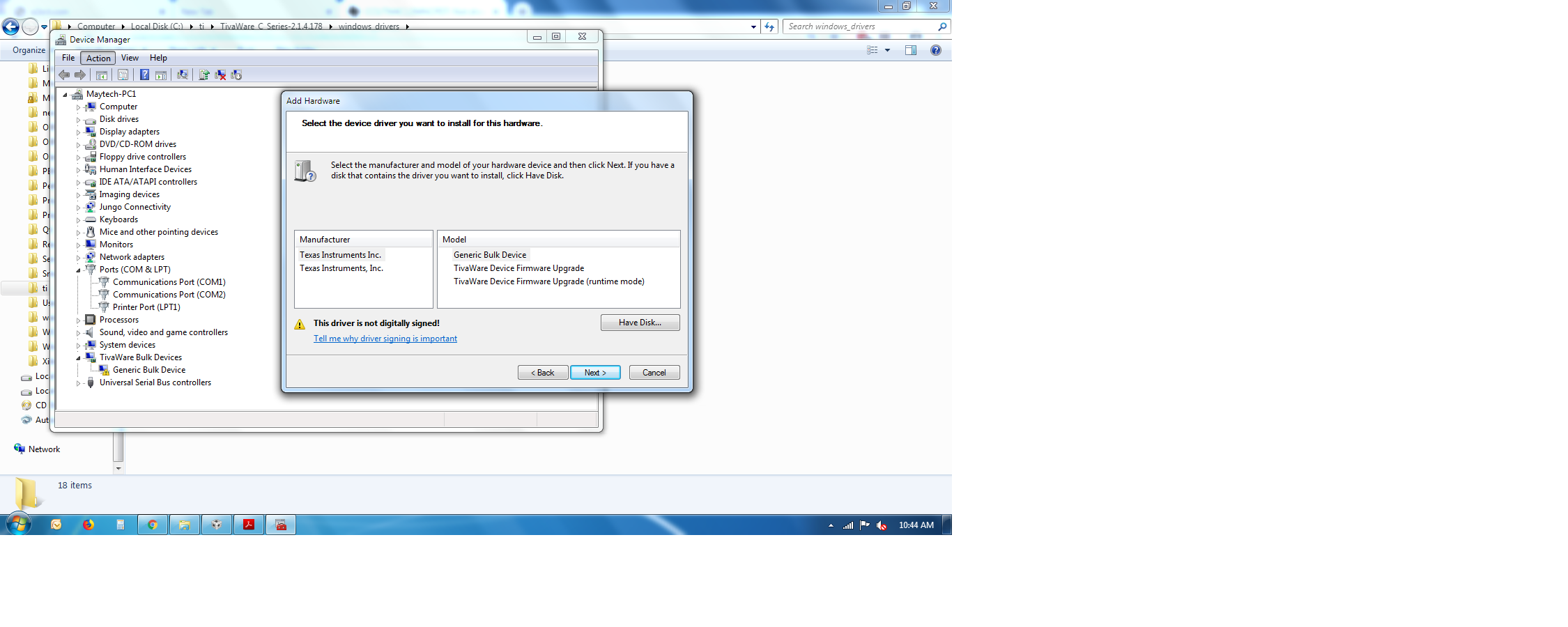
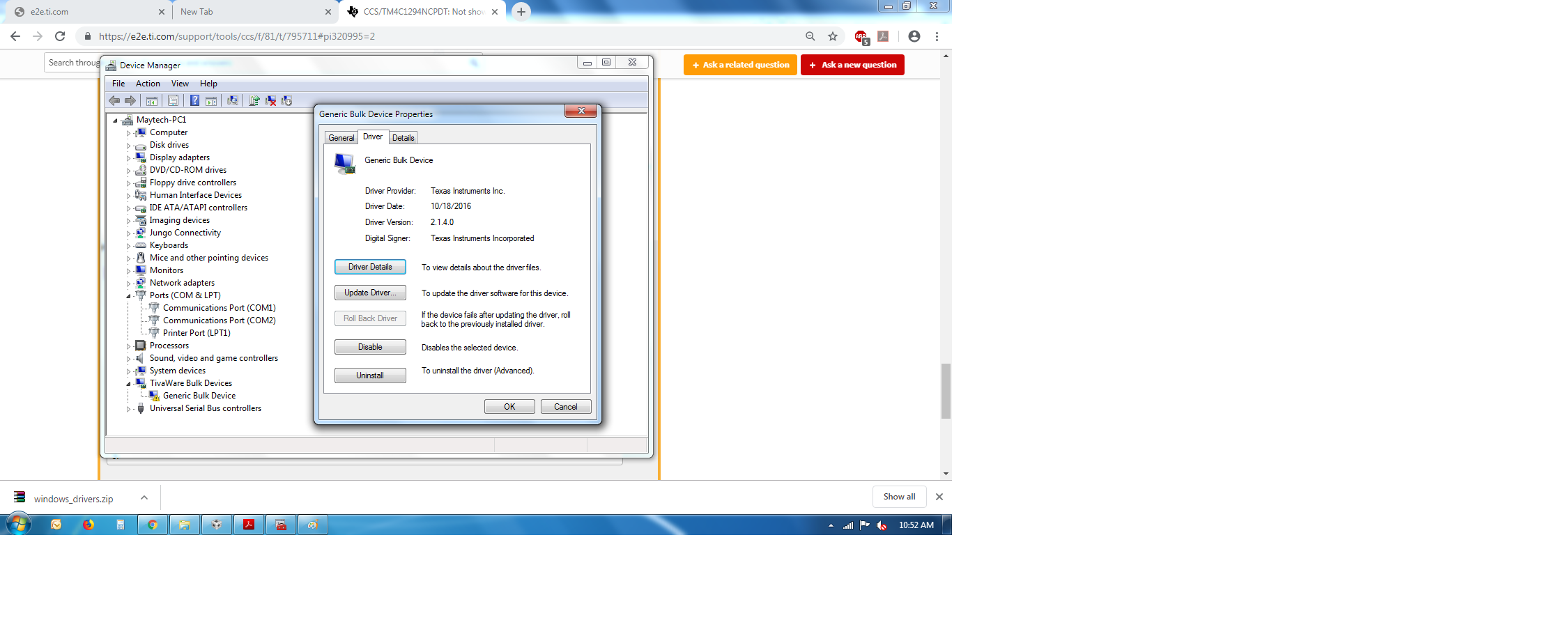
detecting. I have already downloaded the windows_drivers (C:\TI\TivaWare_C_Series-2.1.4.178\windows_drivers) and I am using the EK-TM4C1294XL Launchpad.
Please suggest some solution so that I can further proceed.
Thanks & Regards,
Anamika