Part Number: MSP432P401R
Other Parts Discussed in Thread: SYSBIOS
Tool/software: Code Composer Studio
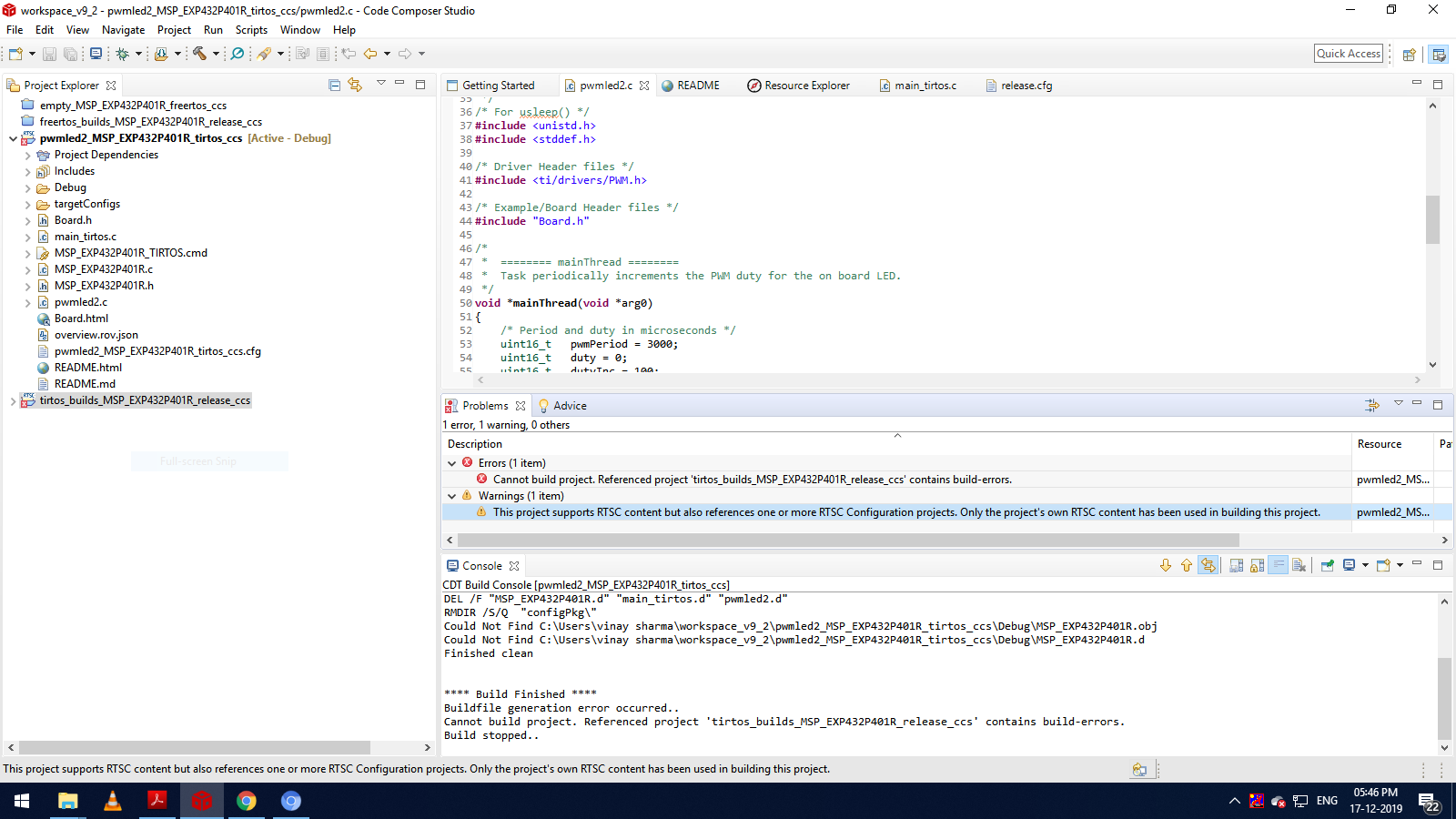
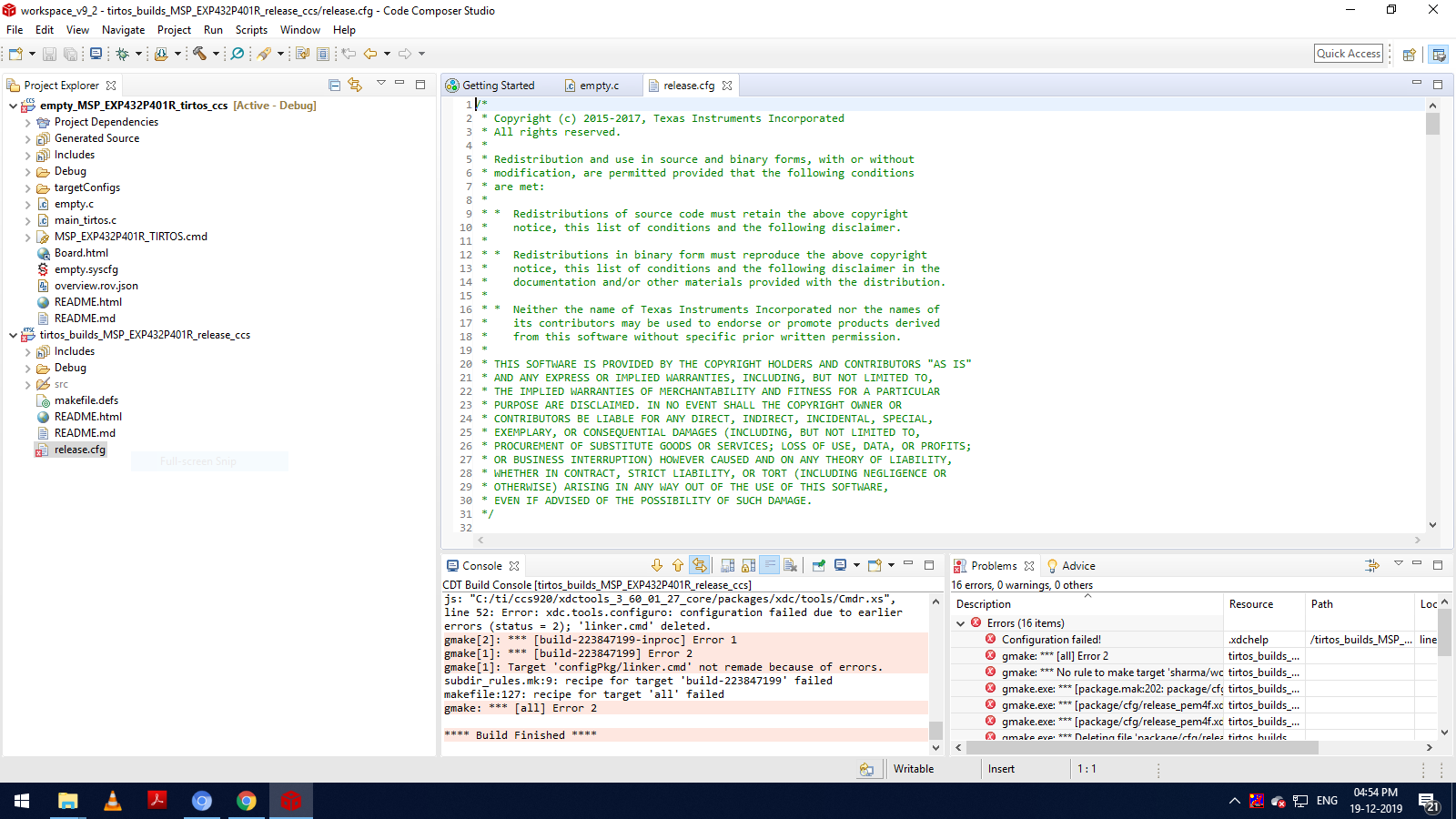
Hi my name vinay sharma now am learning programming in CCS. I have CCS 9_2 version and SDK 2_30_00_14 version but in which a problem in my computer.when i tried to debug the SDK code than generate a error message show in this image so what i will happen after this problem which file i can edit my requirement in show all SDK files