Part Number: TM4C1294NCPDT
Other Parts Discussed in Thread: EK-TM4C1294XL,
Tool/software: Code Composer Studio
Hi there,
Recently i have a gotten a example code for a watchdog timer from this forum. I am trying to learn more about implementing the watchdog and set myself to do some modification with the code. From the code Watchdog_timer2 is a code that i modified. My end goal was to do a blinking LED with a watchdog that will reset the mcu after a certain time. I did quite a alot of trial and errors and i couldn't think of a way forward. I am wondering if anyone can point me to the right direction or areas that i can read-up more about. Currently, when i debug, it will show the error that i attached here as well
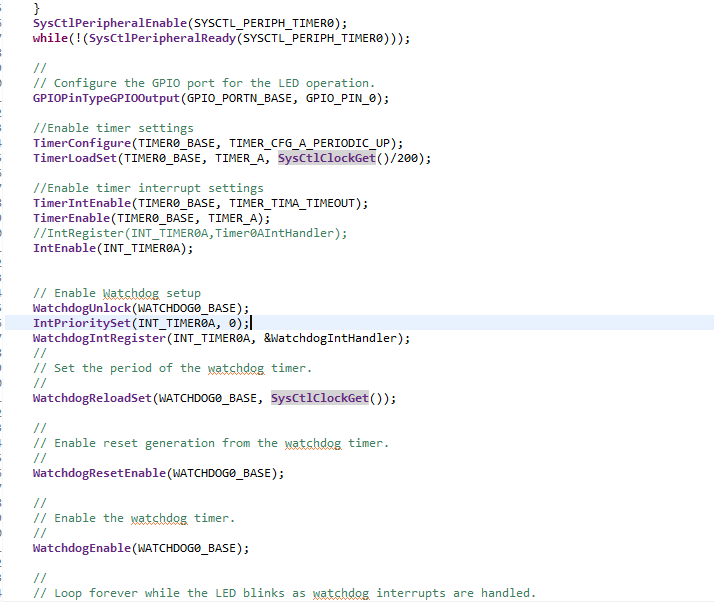
watchdog_timer2 code -> my attempt to implement this to do a blinking LED with a watchdog that will reset the mcu after a certain time [For learning purpose]
watchdog-> is the example code that was given to me by someone in the forum. I am trying to not go with a hardware switch interrupt and also to really understand the code itself
error -> is error message when i debug watchdog_timer2
Wondering if anyone can help
Much appreciated !
//*****************************************************************************
//
// watchdog.c - Watchdog timer example.
//
// Copyright (c) 2019-2020 Texas Instruments Incorporated. All rights reserved.
// Software License Agreement
//
// Texas Instruments (TI) is supplying this software for use solely and
// exclusively on TI's microcontroller products. The software is owned by
// TI and/or its suppliers, and is protected under applicable copyright
// laws. You may not combine this software with "viral" open-source
// software in order to form a larger program.
//
// THIS SOFTWARE IS PROVIDED "AS IS" AND WITH ALL FAULTS.
// NO WARRANTIES, WHETHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING, BUT
// NOT LIMITED TO, IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE. TI SHALL NOT, UNDER ANY
// CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR CONSEQUENTIAL
// DAMAGES, FOR ANY REASON WHATSOEVER.
//
//*****************************************************************************
#include <stdint.h>
#include <stdbool.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "driverlib/debug.h"
#include "driverlib/fpu.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/interrupt.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "driverlib/watchdog.h"
//*****************************************************************************
//
//! \addtogroup example_list
//! <h1>Watchdog (watchdog)</h1>
//!
//! This example application demonstrates the use of the watchdog as a simple
//! heartbeat for the system. If the watchdog is not periodically fed, it will
//! reset the system. Each time the watchdog is fed, the LED is inverted so
//! that it is easy to see that it is being fed, which occurs once every
//! second. To stop the watchdog being fed and cause a system reset, press
//! the SW1 button.
//!
//! UART0, connected to the Virtual Serial Port and running at 115,200, 8-N-1,
//! is used to display messages from this application.
//
//*****************************************************************************
//*****************************************************************************
//*****************************************************************************
//
// The error routine that is called if the driver library encounters an error.
//
//*****************************************************************************
#ifdef DEBUG
void
__error__(char *pcFilename, uint32_t ui32Line)
{
}
#endif
//*****************************************************************************
//
// The interrupt handler for the watchdog. This feeds the dog (so that the
// processor does not get reset) and blinks the blue LED.
//
//*****************************************************************************
int cycle;
void
WatchdogIntHandler(void)
{
if(cycle>=10){
return;
}
WatchdogIntClear(WATCHDOG0_BASE);
cycle++;
}
//*****************************************************************************
//
// This example demonstrates the use of the watchdog timer.
//
//*****************************************************************************
int
main(void)
{
volatile uint32_t ui32Loop;
//
// Enable lazy stacking for interrupt handlers. This allows floating-point
// instructions to be used within interrupt handlers, but at the expense of
// extra stack usage.
//
//FPULazyStackingEnable();
//
// Set the clocking to run directly from the crystal.
//
SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN |
SYSCTL_XTAL_16MHZ);
//
// Enable the peripherals used by this example.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_WDOG0);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPION);
while(!SysCtlPeripheralReady(SYSCTL_PERIPH_GPION))
{
}
//
// Configure the GPIO port for the LED operation.
//
GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE, GPIO_PIN_0);
WatchdogUnlock(WATCHDOG0_BASE);
IntPrioritySet(INT_WATCHDOG, 0);
WatchdogIntRegister(WATCHDOG0_BASE, &WatchdogIntHandler);
//
// Set the period of the watchdog timer.
//
WatchdogReloadSet(WATCHDOG0_BASE, SysCtlClockGet());
//
// Enable reset generation from the watchdog timer.
//
WatchdogResetEnable(WATCHDOG0_BASE);
//
// Enable the watchdog timer.
//
WatchdogEnable(WATCHDOG0_BASE);
//
// Loop forever while the LED blinks as watchdog interrupts are handled.
while(1)
{
//
// Turn on the LED.
//
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0, GPIO_PIN_0);
//
// Delay for a bit.
//
for(ui32Loop = 0; ui32Loop < 200000; ui32Loop++)
{
}
//
// Turn off the LED.
//
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0, 0x00);
//
// Delay for a bit.
//
for(ui32Loop = 0; ui32Loop < 200000; ui32Loop++)
{
}
}
}
 1145.watchdog.zip
1145.watchdog.zip