


Part Number: MSP430FR5969
Other Parts Discussed in Thread: MSP430WARE
Tool/software: Code Composer Studio
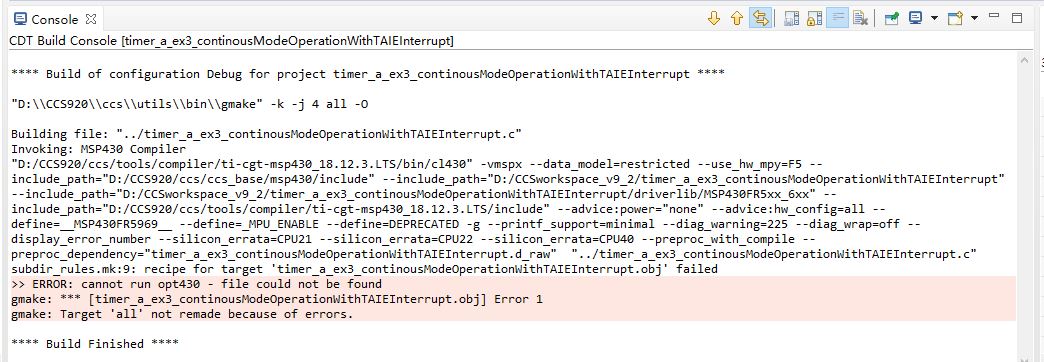
The code worked well before. Suddenly when i complie it, the code starts to report errors. Below is the error. It seems that it could not find the file, however, the file is just under the same path. I don't why.
Please help me.Thank you very much.
my code is load from the example code, and below is my code:
/* --COPYRIGHT--,BSD
* Copyright (c) 2017, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//******************************************************************************
//! TIMER_A, Toggle P1.0, Overflow ISR, 32kHz ACLK
//!
//! Description: Toggle P1.0 using software and the TIMER_A overflow ISR.
//! In this example an ISR triggers when TB overflows. Inside the ISR P1.0
//! is toggled. Toggle rate is exactly 0.25Hz = [32kHz/FFFFh]/2. Proper use of the
//! TAIV interrupt vector generator is demonstrated.
//! ACLK = TBCLK = 32kHz, MCLK = SMCLK = default DCO ~ 1.045MHz
//!
//! Tested On: MSP430FR5969
//! ---------------
//! /|\| |
//! | | |
//! --|RST |
//! | |
//! | P1.0|-->LED
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - Timer peripheral
//! - GPIO peripheral
//!
//! This example uses the following interrupt handlers. To use this example
//! in your own application you must add these interrupt handlers to your
//! vector table.
//! - TIMER_A7
//!
//
//*****************************************************************************
#include "driverlib.h"
void main (void)
{
//Stop WDT
WDT_A_hold(WDT_A_BASE);
//Set P1.0 to output direction
GPIO_setAsOutputPin(
GPIO_PORT_P1,
GPIO_PIN0
);
/*
* Disable the GPIO power-on default high-impedance mode to activate
* previously configured port settings
*/
PMM_unlockLPM5();
//Start timer in continuous mode sourced by ACLK
Timer_A_clearTimerInterrupt(TIMER_A1_BASE);
Timer_A_initContinuousModeParam param = {0};
param.clockSource = TIMER_A_CLOCKSOURCE_SMCLK;
param.clockSourceDivider = TIMER_A_CLOCKSOURCE_DIVIDER_1;
param.timerInterruptEnable_TAIE = TIMER_A_TAIE_INTERRUPT_ENABLE;
param.timerClear = TIMER_A_DO_CLEAR;
param.startTimer = false;
Timer_A_initContinuousMode(TIMER_A1_BASE, ¶m);
Timer_A_startCounter(TIMER_A1_BASE,
TIMER_A_CONTINUOUS_MODE
);
//Enter LPM0, enable interrupts
__bis_SR_register(LPM0_bits + GIE);
//For debugger
__no_operation();
}
//******************************************************************************
//
//This is the TIMER1_A3 interrupt vector service routine.
//
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=TIMER1_A1_VECTOR
__interrupt
#elif defined(__GNUC__)
__attribute__((interrupt(TIMER1_A1_VECTOR)))
#endif
void TIMER1_A1_ISR (void)
{
//Any access, read or write, of the TAIV register automatically resets the
//highest "pending" interrupt flag
switch ( __even_in_range(TA1IV,14) ){ //只能与switch 语句结合使用,判断value 是否为偶数且小于等于upper_limit.在判断多中断源的中断的来源时可以使用此函数
case 0: break; //No interrupt
case 2: break; //CCR1 not used
case 4: break; //CCR2 not used
case 6: break; //CCR3 not used
case 8: break; //CCR4 not used
case 10: break; //CCR5 not used
case 12: break; //CCR6 not used
case 14:
//Toggle P1.0 // overflow
GPIO_toggleOutputOnPin(
GPIO_PORT_P1,
GPIO_PIN0
);
break;
default: break;
}
}
