Other Parts Discussed in Thread: CC1312R
Tool/software: Code Composer Studio
Dead sir/madam.
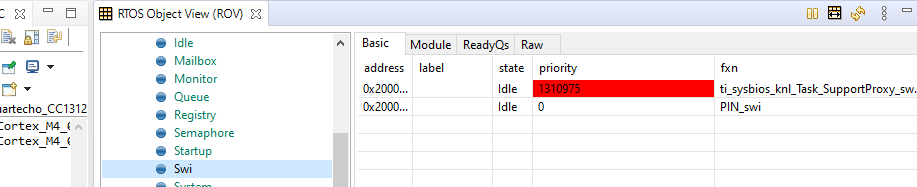
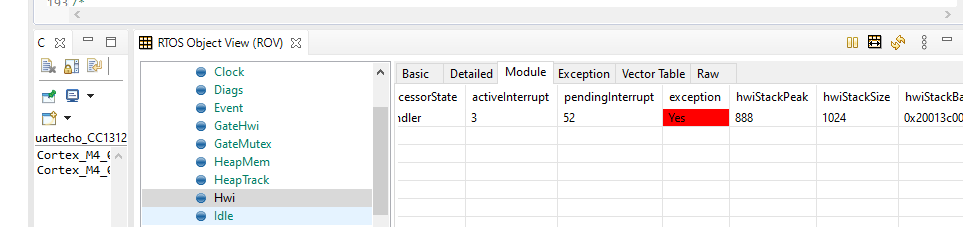
i am running an modified uart program(with adding uasrt callback and timer callback.the program Error_policyMin after some time. and i got the following error.
can someone give me idea why will it happen