Part Number: CC3235MODSF
Other Parts Discussed in Thread: SYSCONFIG
Tool/software: Code Composer Studio
Hi TI,
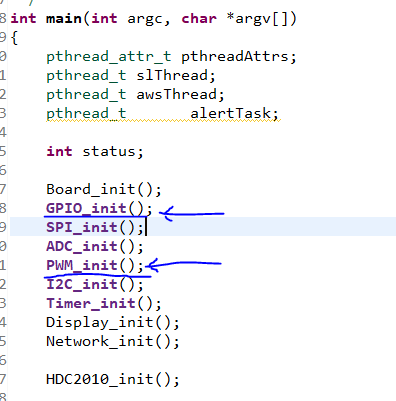
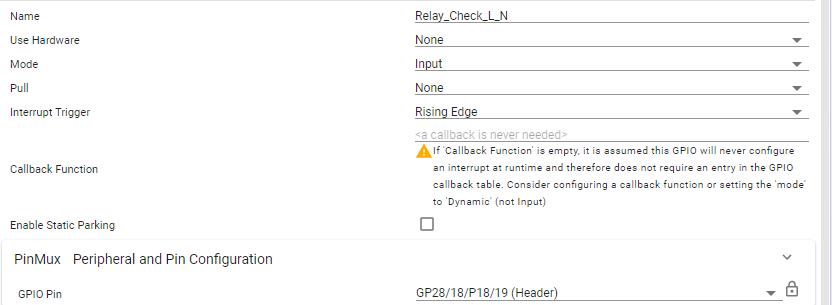
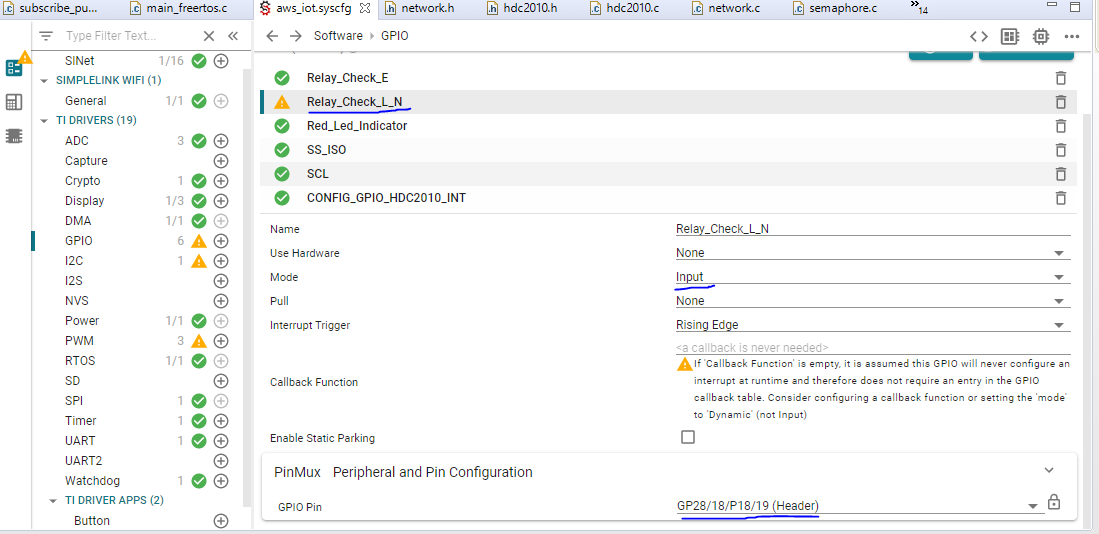
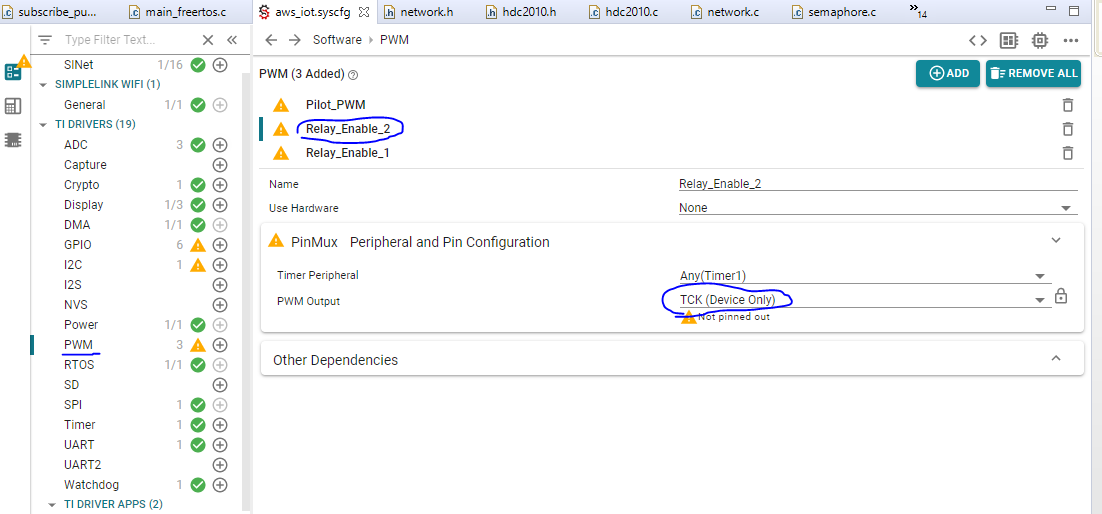
whenever we are using TCK pin as PWM, and defining GPIO28 as input pin , this gpio is not taking any input, while changing PWM with another pin, gpio28 is working properly. please let us know why it is happening. please help out us to resolve this issue.
gpio28 in sysconfig pic
pwm sysconfig pic
Br,
Sarju Bhatnagar