Other Parts Discussed in Thread: TIDA-01362, TIDA-00274, TIDA-010056, DRV8313, DRV8316
Hello,
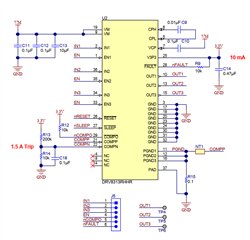
I have a question regarding the TIDA-00827 reference Design.
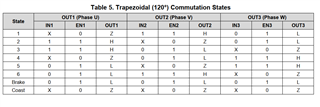
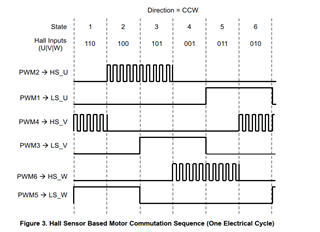
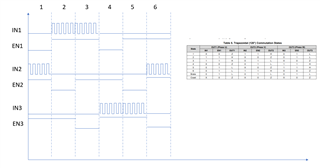
We would like to realize quite similiar to the reference Design a trapezoidal control and would need to bring all EN on one pin of the micro.
my question is there a different firmware for this or is it the same like for the stepper motor TIDA-01362?
and when do i need seperated ENx for the control of the BLDC like at the TIDA-00274?
Hope you can help me thanks
Alex