


Hi team,
My customer have some questions here.
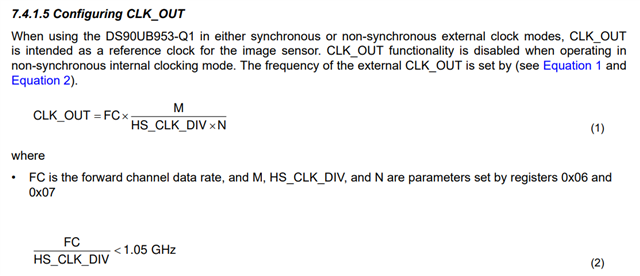
1.How can I setup the CLK_OUT to 24MHz?
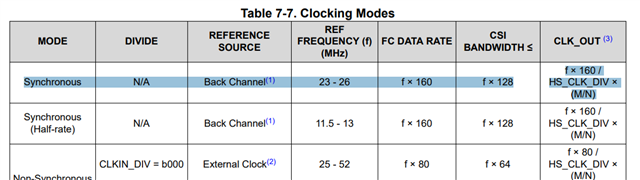
Regarding to datasheet Equation 1 and 2 below. FC is the forward channel data rate, and M, HS_CLK_DIV, and N are parameters set by registers 0x06 and 0x07. it mean I need to write registers 0x06 and 0x07 then I can achieve 24MHz CLK_OUT. is it correct?
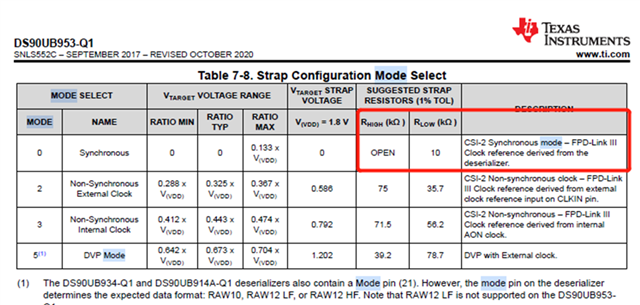
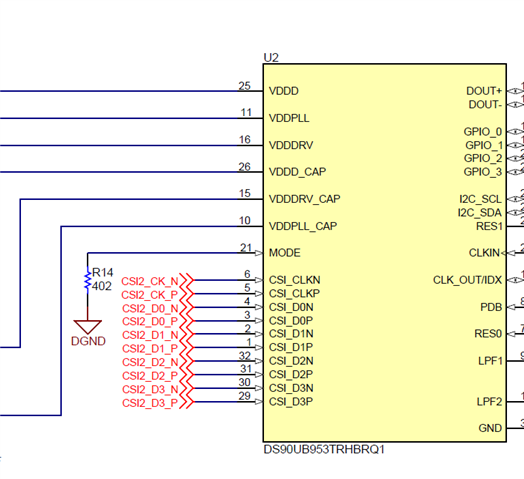
2.Select Mode 0 that Rhigh/Rlow = open/10kohms as first pic below datasheet. but TIDA-050060's schematic show that MODE Pin connect 402ohms to GND as 2nd pic below. i think 10kohms is correct. just would like to double check.
3.Since my customer is designing camera module following TIDA-050060. do we have any document can support customer to write the register of ser/des?
4.If we have setup the register of ser/des, PMIC and image sensor. what kind of thing we need to notice? or just connect image sensor to ser/des to display. Generally the image will be show on screen?
BR,
Jimmy
